
ID : 7280
动作准备
为从下记的状态中开始运作COBOTTA,需要进行动作准备。
- COBOTTA启动时
- 当解除安全方面的错误状态(LED亮红色)时
- 临时释放紧急停止输入信号或防护停止输入信号后短路时
- 在对COBOTTA发送安全数据时
在动作准备结束前,将无法进行电机ON、程序启动(机器人指令的执行)、直接教导、制动器解除的操作。
操作方法
分为以下3个方法。
通过COBOTTA参数工具向COBOTTA发送安全数据后,需要在TP应用的动作准备画面上确认参数。
通过TP应用确认之前无法通过I/O指令或机器人程序进行动作准备。
以下就各种方法进行说明。
通过应用程序操作
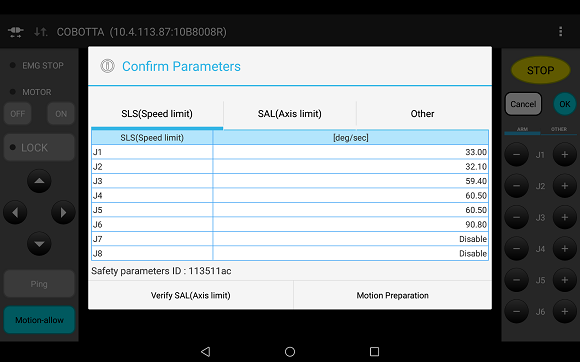
通过远程TP或者虚拟TP进行操作时,在需要动作准备的状态下,将会显示下记画面。
确认所有参数后,[动作准备]按钮将变为有效,所以请按下[动作准备]按钮。下记画面消失后,动作准备即完毕。
此外,在某个状况下进行动作准备后,可能反复发生错误。关于这种情况下的应对方法,请参照“动作准备后错误反复发生时”。
- 远程TP
- 虚拟TP
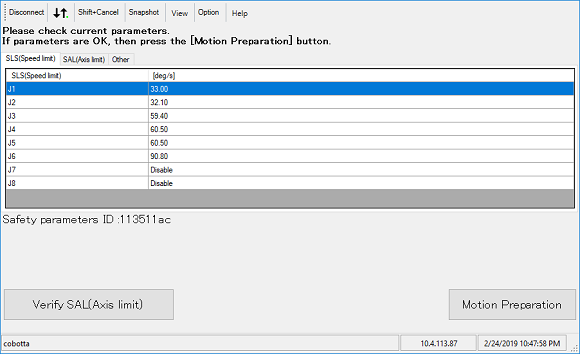
安全参数ID
安全参数ID是一个随参数设定值变化的固有值。
存储在COBOTTA中的安全参数用于确认为哪一个Scene。
详细内容请参照“按Scene管理”。
通过I/O指令操作
执行I/O指令
I/O指令的内容因“现场网络接口模块”的使用状况而异。
不使用现场网络接口模块时
关于I/O指令的使用方法请参照“I/O指令的使用方法”。
| I/O配置的种类 | 指令区域 | 数据区域 |
|---|---|---|
| Mini I/O专用 | 000 运行准备 | 001 电机ON 010 外部速度100(SP100) 100 动作准备 111 上记全按(动作准备→电机ON→SP100) |
当有多个输入时、将按照动作准备→电机ON→SP100的顺序来处理。
使用现场网络接口模块时
详细内容请参照“I/O指令一览”。
| I/O配置的种类 | 指令区域 | 数据领域1 |
|---|---|---|
| 标准 | 0111 模式切换 | 00000001 电机ON 00000010 外部速度100(SP100) 00000100 动作准备 00000111 上记全按(动作准备→电机ON→SP100) |
通过机器人程序操作的方法
使用以下PacScript的指令。关于各个指令的详情,请参阅以下参照位置。
| 指令 (参照位置) |
功能 |
|---|---|
| MotionPreparation |
自动执行动作准备。 |
| GetMotionPreparationState | 获取动作准备完成状态。 |
ID : 7280
- 本页相关信息
- 动作准备后错误反复发生时