
ID : 1273
规格
此处按照如下分类进行了规格填写。
产品名称
| 产品名称 | COBOTTA |
|---|
动作
| 精度 |
重复定位精度±0.05 mm |
|---|---|
|
力 |
最大可搬运质量
|
最大容许力矩
|
|
最大允许惯性力矩(惯量)
|
|
| 运行范围 |
运行区域 |
各轴的动作角度
|
|
| 手动运行时的最大速度 | 250 mm/s |
外观、质量
| 机械臂全长 | 342.5 mm |
|---|---|
| 尺寸 | 尺寸“请点击此处(PDF:543KB)” |
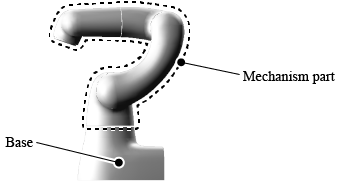
| 本体总重量 | 约4 kg |
| 机构部分的总质量 |
约2.4 kg (机构部分是指基础以外的部分)
|
| 重心位置 | 关于包装姿势中的COBOTTA本体重心位置,“请点击此处(PDF:808KB)”。 |
构造
| 轴数 | 6 |
|---|---|
| 驱动电机 | 无刷电机 |
| 制动器 | 1轴~5轴带制动器 |
| 保护等级 |
|
| 安装方向 | 地面设置 |
| 噪音 (等价噪音等级 (A 特性)) |
55dB 以下
(额定负载、按出厂时的最高速度测量) |
| 日期和时刻保持用电池 |
|
设置场所的环境条件
| 保管/运输时 | 运作时 | |
|---|---|---|
| 环境温度 | -10°C ~ 60°C | 0°C ~ 40°C |
| 相对湿度 | 20%RH ~ 80%RH (不可结露) | |
| 振动 | 29.4 m/s² (3 G) 以下 | 4.9 m/s² (0.5 G) 以下 |
| 高度 | -- | 1,000 m 以下 |
| 水平度 | 0.5° | |
| 设置面的平面度 | 0.1/500 mm | |
| 污损度(污染度)(*1) | 2 (*1) |
|
| 过电压范畴 (*2) | II (*2) |
|
|
无法设置的场所 |
|
|
*1依据IEC 60664-1。污染度2相当于家庭和办公环境。
*2依据IEC 60664。过电压范畴II是指从固定设备(插座等)供应能量消耗型机器。
功能
|
COBOTTA用电动夹爪 (选件) |
|
|---|---|
电动真空发生器 (选件) |
|
|
AF照相机(N10-W02) (选件) |
标准OS版本
OSS版本不能使用 |
与外部设备的通信(I/F)
|
Mini I/O |
概要标配I/O |
|---|---|
输出入条数[标准OS版本 (仅Mini I/O时)]
[标准OS版本 (使用现场网络接口模块时)]
[OSS版本]
|
|
I/O配置请参照“I/O配置” |
|
电压
|
|
电缆(选件)
|
|
|
现场网络 |
概要使用选配的现场网络接口模块,可适用以下现场网络。
现场网络接口模块的外形尺寸请参照 “这里(PDF:272KB)”。 OSS版中不能使用。 |
输出入条数[PROFINET IO Device]
[EtherNet/IP Adapter]
[EtherCAT Slave]
|
|
I/O配置[PROFINET IO Device][EtherNet/IP Adapter]请参照"EtherNet/IP Adapter的I/O配置" [EtherCAT Slave] |
|
|
Ethernet |
|
| USB | USB2.0 × 2 |
|
外部显示器输出 (选件) |
|
编程
标准OS版本
| 使用语言 |
通过COBOTTA专用图标编程或者电装机器人语言(PacScript) |
|---|---|
| 存储器容量 |
|
| 演示方式 |
|
OSS版本
| 使用语言 |
C++、Python、Java、Lisp等 |
|---|---|
| 教导方式 | 系统中未准备,因此请由客户自行创建功能。 |
电源
| 电源 |
|
|---|---|
| 输入最大电流 | 2.5 A |
| 耗电量 | 180 W |
| AC适配器质量 | 860 g (EU用: 485 g) |
| 漏电电流值 |
|
安全相关注意事项
| 本质安全设计 |
|
|---|---|
| 错误显示 |
标准OS版本正常状态、错误发生状态、直接教导状态等通过LED颜色和亮灯/灭灯来显示 详情请参照关于“作业上注意”的“状态显示LED” OSS版本可自由控制LED颜色和闪烁周期。因此,用作工业用机器人时,需要由客户自行满足相关规格·法规。 |
安全关联控制系统
|
种类 |
紧急停止功能强制停止COBOTTA的功能 (输出紧急停止状态的功能 (紧急停止箱状态输出) 不包含在安全关联控制系统中)
|
|||
|---|---|---|---|---|
防护停止功能强制停止COBOTTA的功能 (可在运作过程中可重新启动)
|
||||
速度限制功能监视COBOTTA的速度且超出限制速度后停止COBOTTA的功能
|
||||
扭矩限制功能监视COBOTTA的扭矩且超出限制扭矩值后停止COBOTTA的功能
|
||||
轴限制功能监视COBOTTA的轴且超出限制角度后停止COBOTTA的功能
|
||||
| 安全性能 | 关于PL及MTTFd等的安全性能,请参照“安全关联控制系统的安全性能”。 | |||
| 停止性能 | 关于停止距离和停止时间等的停止性能,请参照“安全关联控制系统的停止性能”。 | |||
| 功能构成 |
关于功能构成,请参照“安全关联控制系统的功能构成”。 |
COBOTTA各轴上具有监视速度的功能。因此,各轴速度超出监视速度时,机器人会停止。
但是,这并不能保证所有情况下都安全。请执行风险评估并依此采取安全保护措施后使用。
保修内容
| 保修内容 | 请参照“产品保修” |
|---|
型式
| 型式 | 请参照“型式” |
|---|
ID : 1273
- 本页相关信息
- 外形(运作范围)一览
- I/O配置
- 安全关联控制系统的性能
- 型式
- 产品保修