
ID : 7147
操作注意事项
- COBOTTA的使用对象为16岁以上人员。
- 使用COBOTTA时可与COBOTTA接触的人体部位为上半身(手指、手部、手腕、胸、肩、后背、腹部、腰部)です。
未特别指定时,此处的“作业”包括机器人的运输、安装、机器人设备的组装(电气配线、工具和电动夹治具组装、气动配管)、调整、异常处理、维护点检和清洁等所有操作。
穿戴防护装备
- 作业人员应应根据风险评估,穿戴安全帽、安全鞋、护目镜等防护装备。
- 使用润滑脂时,请佩戴手套和护目镜等防护装备,以防润滑脂接触到皮肤或眼睛。
作业中的注意事项
- 作业时请勿将身体伸入机器人下方。在应用程序的风险评估中假设会接触到身体时,应采取穿戴防护装备及安装挡板等保护措施。
- 将勿将头伸入机器人限制空间内。
- 请不要向机器人施加强力,否则会可能会造成损坏。另外,请不要骑乘或悬吊。
-
请注意避免头发及衣服被卷入。
- 解除制动器后,会因自重而移动。请在支撑机器人的状态下解除制动器。
- 在限制空间内进行作业时,请将紧急停止开关安装作业人员附近,以便在紧急情况下能够立即停止机器人。
- 机器人在使用中会变热。如果在环境温度高时接触,有可能会烫伤。因直接教导等长时间接触时,请等到电源断开冷却。
制定“作业规定”并确保作业人员切实遵守
请参考以下事项制定“作业规定”,并监督作业人员切实履行。
- 起动方法、开关的使用方法等作业所需的机器人操作步骤
- 进行教导等作业时的机器人速度
- 多名人员进行作业时的联络方式
- 发生异常时,作业人员应采取的相应措施
- 紧急停止装置起动且机器人运行停止后,为重新起动机器人所应采取的措施(异常情况解除确认、安全确认等)。
- 除上述内容外,为防止因机器人突然运行或误操作造成的危险,需要采取以下措施。
- 操作盘上的显示
- 确保限制空间内作业人员的安全
- 确保正确的作业位置和姿势 能够始终确认机器人动作及发生异常时可立即躲避的位置和姿势
- 实施防干扰措施
- 与相关设备操作人员的联络方式
- 异常的种类及其判别方法
根据机器人的种类、安装场所、作业内容,制定相应的“作业规定”。
制定“作业规定”时,请积极采纳相关作业人员、设备制造商的技术员、劳动安全顾问等有关人员的意见。
操作盘上的显示
作业时,为防止其他工作人员意外启动或切换开关等,应在平板电脑或操作盘上显示“作业中”等简易信息。根据情况,对操作盘的外壳采取加锁等措施。
电动夹治具的安全安装和使用方法
- 安装、使用、安装夹治具、工具(终端受动器)时,注意防止因电源OFF或气源、电源变化发生的危险。另外,也应考虑装置内部残留的能量。
- 由客户准备选件夹治具的手指时,请实施风险评估并采取无锋利处的形状等保护措施。此外,由客户准备整个夹治具时,也请实施风险评估并采取避免出现140N以上的力和无锋利处的形状等保护措施。
- 在设计、制作、安装夹治具及工件时,应满足工具(安装在臂前端的设备)。如果不满足,则有可能会造成对人员的伤害、机器人损坏。此外,不在保修范围内。
- 电动真空发生器在进行连续运行后可能变成高温。因更换真空垫等而接触电动真空发生器时,请在完全冷却之后再进行作业。
- 请勿窥视电动真空发生器的进气口。否则可能会因送风动作等而喷出积在电动真空发生器滤网上的垃圾等。
关于照相机
由客户准备安装到机械臂上的照相机时,请实施风险评估并采取无锋利处的形状等保护措施。此外,因无法使用选件AF照相机(N10-W02)的校准数据,所以请客户务必校准。
速度限制值等参数的设定
- 速度限制值等参数请在实施风险评估后再决定。
- 请用COBOTTA参数工具确认所有参数是否正确设定后发送给机器人。关于参数的设定方法,请参照“CCOBOTTA参数工具用户指南(PDF:2,639KB)。
选择帮助菜单中的“用户指南”可以打开。
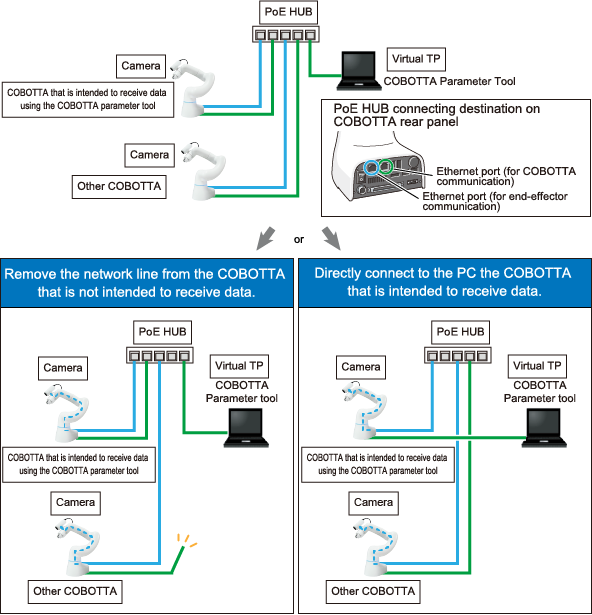
此外,将COBOTTA参数工具的数据发送到COBOTTA时,请将应发送COBOTTA参数工具和数据的COBOTTA一对一连接。
例如,如下图所示,2台COBOTTA使用PoE HUB连接时,请按以下方法之一重新连接。
- 拆掉不发送数据的COBOTTA网线
- 将发送数据的COBOTTA直接连接到PC上
这种状态下请在发送COBOTTA参数工具的数据后恢复连接。
- 参数发送后,请确认是否按照要求动作。
-
请妥善管理密码,以防止因参数变更而造成的事故。
作业开始前的点检
开始作业前检查以下事项,并在发现异常后立即采取维修及其它必要措施。
- 外部电线的表皮或外包装有无损坏、有无错误配线
- 机器人有无运行异常(起动时是否有异常的声音、振动)
- 紧急停止装置的功能
- 配管是否漏气或漏油
- 机器人的限制空间内或附近有无障碍物
- 应在作业人员附近设置紧急停止开关,以便作业人员能立即按下紧急停止开关
- 非作业人员不得进入限制空间内
- 应固定,以防机器人掉落或翻倒
接通电源前检查
接通过COBOTTA的电源前请确认配线和电缆的损坏状态,以免出现故障或触电等。
释放残压
拆解空气系统部分或更换零部件等时,先释放驱动用气缸内的残压。
安装和更换零部件后的初始测试
安装和更换零部件后及升级软件版本后请进行初始测试。
初始测试请实施以下项目。
- 实施与年检相同的检查。
-
请确认安全相关功能是否正常运行。
(例 : 在低速运行机器人的过程中按下紧急停止箱上的按钮,确认机器人停止。)
- 请确认各轴是否可通过手动动作正常运行。
若上述项目全部没有问题,则合格。
确认运行时的注意事项
作业人员应尽可能离开限制空间,然后进行确认运行。
另外,实施初始测试和定期检查,以确认防护手段是否有效。防护手段包括紧急停止开关、防护停止信号、机械式限制器(机械限动器),安全功能(SLS、SLT、SAL)等。
诊断动作时的注意事项
诊断动作中可能发生意外动作。请勿进入机器人的可运行范围内。
CALSET时的注意事项
自动运行到CALSET位置期间可能做出意外动作。请勿进入机器人的可运行范围内。
包装姿势动作时的注意事项
正在包装姿势动作时可能做出意外动作。请勿进入机器人的可运行范围内。
程序启动时注意
-
启动时的措施
程序启动前,确认所有安全防护功能均已启用。确认以下事项时事先决定联络方式,与相关作业人员进行联系。
- 工具等均位于规定位置。
- 机器人或相关设备的异常指示灯无异常显示。
- 机器人的周围没有人员。
- 发生异常时的措施
为了在机器人或相关设备发生异常采取紧急处理,应在靠近机器人时,应通过采取起动紧急停止装置等中止机器人的运行,并在启动开关中显示“作业中”等信息,以防止其他工作人员操作机器人。
作业时的电源切断
- 为确保安全,进行安装、组装(电气配线、夹治具和工具组装、气动配管)、日常检查、保养检查、维修、零部件更换等作业时,请切断电源。
- COBOTTA的电源开关用于切断二次侧。即使切断电源开关,内部仍存在充电部位。进行作业时,拔出电源连接器或切断设备的制动器,确保切断COBOTTA的供电。
- 然后请采取拔掉插头等措施,以防止其他作业人员突然接通电源。
- 请勿将电源插排的通电开关用作断路器。
清洁时的注意事项
进行机器人和电缆类的清洁时,切断设备的电源断路器,或者是拔下电源连接器。
平板电脑的安全保管
为防止误操作,将不使用的平板电脑放至保管场所。
修理时的注意事项
- 不得进行规定范围以外的修理。
- 任何情况下均不得拆除互锁机构。
- 打开机器人盖时,务必切断机器人的电源开关并拆下电源连接器。
- 用于维修的零部件务必使用本公司指定的产品。
紧急及异常情况时的措施
确定发生紧急及异常情况时作业人员应采取的措施并定期进行培训。
万一身体的部分被COBOTTA夹住时,
- 请从平板电脑解除制动器退出。制动器的解除方法请参照“设定制动器”。
- 无法解除制动器时,请通过夹持机械臂拉制动器移动再退出。
按压轴时注意不要用力过度导致受伤。尤其应注意未安装制动器的轴。
下表表示移动各轴90°时的制动器寿命。
| 制动器寿命[次] | |
|---|---|
| 1轴 | 350 |
| 2轴 | 100 |
| 3轴 | 200 |
| 4轴 | 950 |
| 5轴 | 1,000 |
| 6轴 | - |
6轴不带制动器。
关于机械限动器
机器人与机械限动器发生碰撞时,可能导致机器人损坏。使用前请确认以下内容。
确认后做出位置偏离等意外动作时,请联系本公司售后服务部门。
-
确认机械限动器中的位置
首先请缓慢移动,直到解除COBOTTA的制动器且各轴碰到机械限动器。此时请注意不要对机械限动器施加过大的力。制动器的解除方法请参照“设定制动器”。
然后请确认机械限动器中当前角度值与以下基准值的差不超过5度。
<机械末端基准值>
+侧 -侧 1轴 +152.5 -152.5 2轴 +102.9 -62.9 3轴 +142.1 -15.9 4轴 +172 -172 5轴 +141.2 -101.2 6轴 +173.5 -173.5 -
已教导点的确认
移动到已教导点并确认工具前端与教导点是否偏离。
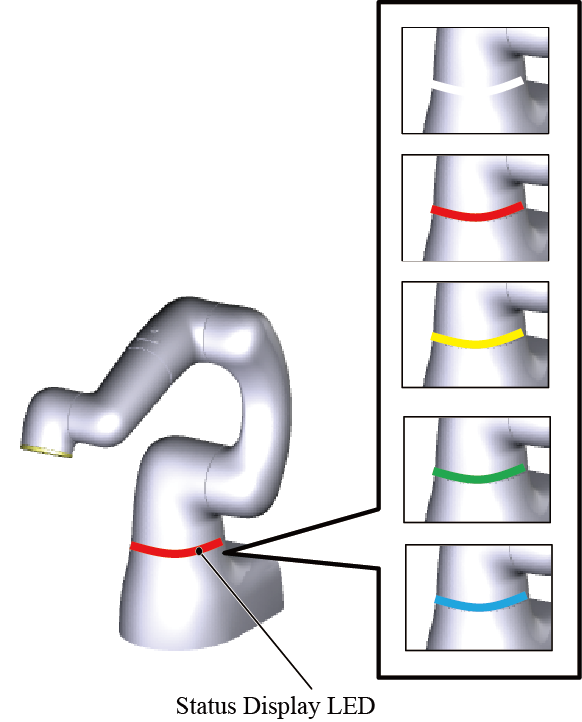
关于状态显示LED
COBOTTA本体配备有表示COBOTTA自身状态的LED。LED的闪烁有快闪烁和慢闪烁2种。COBOTTA正在启动时会有指定颜色的灯亮起或闪烁。
快闪烁时以360msec为一个周期反复亮灯和熄灯。
慢闪烁时以1,440msec为一个周期反复亮灯和熄灯。
关于针对LED显示方法的COBOTTA状态,请参照后述的"LED的显示方法和COBOTTA的状态"。
- LED不显色或部分颜色与指定状态不同时,则LED可能出现故障。请立即停止使用并联系本公司售后服务部门。
- LED对于客户确认COBOTTA的状态很重要,因此请在日常检查时检查LED的发光状态。确认方法请参照“状态显示LED的确认方法”。
状态显示LED在上述也进行过说明,是表示COBOTTA自身状态的LED。不是表示系统整体状态的LED。例如,即使因某些原因按下紧急停止箱的开关,只要COBOTTA本身的状态没有变化,状态显示LED就不会变化。
LED的显示方法和COBOTTA的状态
| 状态 | 机器人 | LED | 对策&备注 | ||
|---|---|---|---|---|---|
| 初始化 | 电源ON | 深绿 | 慢闪烁 | - | |
| 通常 | 直接教导 | 直接教导中 | 蓝 | 亮灯 | - |
| 软件限制附近 | 黄 | 慢闪烁 | - | ||
| 超过软件限位 | 黄 | 快闪烁 | 请返回软件限位的范围内。 | ||
| 特异点附近 | 黄 | 慢闪烁 | - | ||
| 直接准备模式 | 蓝 | 慢闪烁 | - | ||
| 程序运转中 | 慢速启动(SS)中 | 白 | 快闪烁 | - | |
| 程序播放 | 白 | 亮灯 | - | ||
| AutoCAL | AutoCAL执行中 | 白 | 亮灯 | - | |
| 诊断动作 | 诊断动作执行中 | 白 | 亮灯 | - | |
| 手动动作 | 手动动作中 (变量移动中) |
白 | 亮灯 | - | |
| 其他 | 来自操作设备的连接应答 | 绿 | 快闪烁 | 启动权设定为“TP”以外时,则绿色灯亮起。 | |
| 操作装置连接等待 | 绿 | 慢闪烁 | |||
| 操作装置连接中 | 绿 | 亮灯 | - | ||
| 异常 | 黄or红 | 亮灯 | 请遵照错误编码表进行处理。 | ||
以下表示LED的色见本。
所使用的显示器设定、房间照明等不同,则实际LED和颜色搭配可能有所不同。

ID : 7147