
ID : 7166
加減速相対位置移動・把持
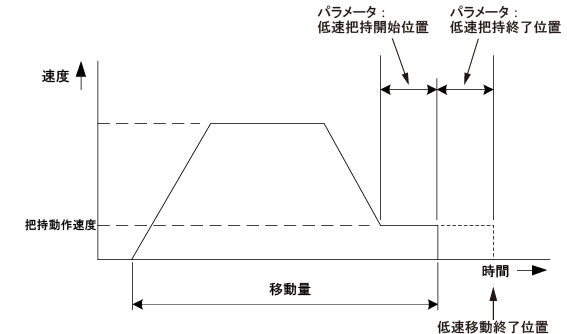
このモードでは、現在位置から指定された移動量の手前まで、台形速度制御にてフィンガを移動し、その後、一定速度(把持動作速度)の把持動作に移行します。把持動作中は指定した把持力でワークを把持します。
把持動作速度を変更したい場合は、ハンド把持速度調整機能で設定します。詳細は「ハンド把持速度調整機能」を参照してください。
指定した位置よりどの程度手前で把持動作に移るかは、あらかじめ、パラメータ「62:低速把持開始位置」で指定します。詳細は「使用準備」を参照してください。
把持動作の途中でワークを把持した場合は、Hold状態になります。
指定位置と低速把持終了位置の合計距離を移動し終えた場合は、Inpos状態になります。
低速把持終了位置は、あらかじめ、パラメータ「63:低速把持終了位置」で指定します。詳細は「使用準備」を参照してください。
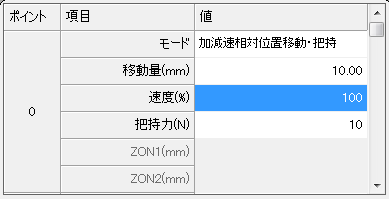
このモードで指定可能な値は、以下の通りです。
| 移動量(mm) |
現在位置からワークまでの移動量を設定してください。 設定可能な範囲は-999.9mm ~ 999.9mmです。 |
|---|---|
| 速度(%) | 設定可能な範囲は1~100です。 |
| 把持力(N) | 設定可能な範囲は6~20です。 |
ID : 7166