
ID : 6967
実施手順
WINCAPSIIIでモデルを作成する場合の手順です。
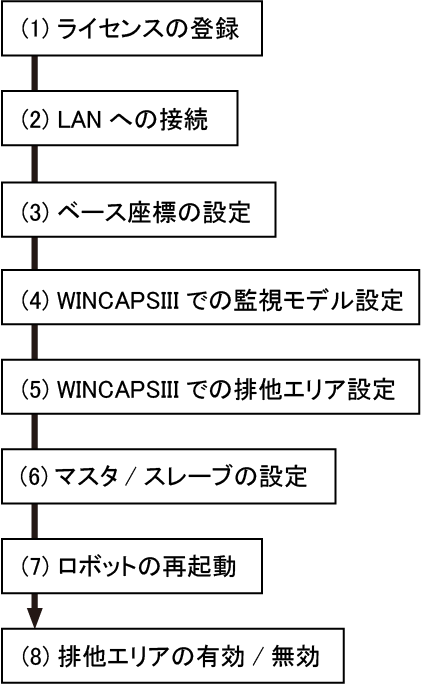
(1) ライセンスの登録
排他制御機能はオプション機能のため、各ロボットにライセンス登録が必要です。
リモートTP/バーチャルTPを使用して行います。
ライセンスの登録方法については、「ライセンス登録」を参照してください。
(2) LANへの接続
各ロボットでIPアドレスの設定を行います。詳しくはTPアプリ操作ガイドの "通信設定画面の表示・変更" を参照してください。
(3) ベース座標の設定
ワールド座標系で排他エリアを設定するため、WINCAPSIIIでベース定義を行います。
(4) WINCAPSIIIでの監視モデル設定
WINCAPSIIIのアームモデリング機能で監視モデルを設定します。
(5) WINCAPSIIIでの排他エリア設定
WINCAPSIIIのアームモデリング機能で排他エリアを作成し、監視モデルデータと一緒にロボットへ送信します。
排他エリアをリモートTP/バーチャルTPまたはコマンドで作成する場合は、ロボットの再起動後に行います。
(6) マスタ/スレーブの設定
各ロボットでマスタ/スレーブの設定を行います。マスタロボットの場合は、さらに通信設定を行います。
(7) ロボットの再起動
マスタロボットと各スレーブロボットを再起動後、排他制御が自動起動します。
ロボットが互いに通信チェックを行っているので、マスタとスレーブを同時に立ち上げます。
(8) 排他エリアの有効/無効
WINCAPSIII、リモートTP/バーチャルTP、コマンドのいずれかで有効/無効を切替えることができます。
ID : 6967