
ID : 6966
機能説明
排他制御機能では、ロボットが侵入しようとしている排他エリアに対し、すでに他のロボットが侵入しているときは、減速または停止することで排他エリアへの複数ロボットの侵入を禁止します。
マスタロボットで情報を管理し、その情報を基に、各ロボットは自身の制御を行います。
- 排他エリアとロボットの動作開始位置が近すぎたり、動作スピードが速すぎる場合、監視のタイミングが合わず、排他エリア内に侵入してエラーで停止することがあります。
- ロボット軸と走行軸は同じアームグループに設定してください。
- 電流制限機能とb-CAPスレーブについては、停止予測位置が正確に求めれないため、排他制御で停止する際に、エラー[0x83201563 : 排他エリア現在値侵入検知]が発生する場合があります。
- 排他制御の待機状態の時には、見た目上は停止していても、その後急に動き出す場合があるため、ロボットの状態を取得するコマンド(MotionComplete等)やI/Oでは"ロボット動作中"状態を返すようになっています。
監視対象
下記を監視対象として設定できます。
- ロボット、ツール
- ロボットと排他エリア
- ツールと排他エリア
- 目標位置
パラメータで設定できます。
現在値および指令位置は常に監視しています。
排他エリア
排他エリアの形状は直方体です。最大で32個設定できます。
排他エリアはワールド座標系で設定します。また、WINCAPSIII、リモートTP/バーチャルTPおよびコマンドで、監視の有効/無効を切替えることができます。
ワールド座標系を有効にするためには、各COBOTTAでベース設定が必要です。
排他エリアの色表示について
3D画像上の排他エリアの色は通常"水色"ですが、待機状態は"黄色"、排他エリアに侵入した場合は"紫色"に変わります。
排他エリアに侵入している状態での開始/変更
ロボット監視モデルまたはツール監視モデルが排他エリアに侵入している状態で、以下のように監視を開始または変更した場合、エラー[0x84201563:排他エリア現在値侵入検知]が発生します。
- ロボットの再起動
- 排他エリアを無効から有効に変更
- 排他エリアの定義を変更
監視の有効/無効
監視の有効
COBOTTAでは、下記の場合に監視が有効になります。
- MoveやApproachなどの動作系コマンドを実行(自動運転)したとき
- リモートTP/バーチャルTPの排他制御画面にて、[F7 監視開始]を押したとき

監視の無効
COBOTTAでは、下記の場合に監視が無効になります。
- キー操作でCOBOTTAを動作(手動操作)させたとき
- 変数画面で変数移動させたとき
- アーム上のファンクションボタンを長押しして、ダイレクトモードへ切り替えたとき
- リモートTP/バーチャルTPの排他制御画面にて、[F8 監視終了]を押したとき

監視が無効であっても、ロボットの状態が待機状態であると、一定時間後に待機タイムアウトでエラーが発生します。この場合は、排他エリアに侵入しているロボットを手動操作で退避させた後に、リモートTP/バーチャルTPの排他制御画面にて、[F7 監視開始]を押して監視を有効にしてください。排他エリアにロボットが侵入している情報をクリアできます。
下記の状態へ切替えた時は、切替え前の状態を保持します。
- 排他エリアを無効にしたとき
- 監視を無効にしたとき
例えば、排他エリアに侵入している状態で監視を無効に切り替えても、エリアに侵入している状態は保持されます。
注意すべき動作例
下の例のように、手動操作でエリア外への退避を行った場合は、待機中の他ロボットが勝手に動き出す可能性がありますので注意してください。
1
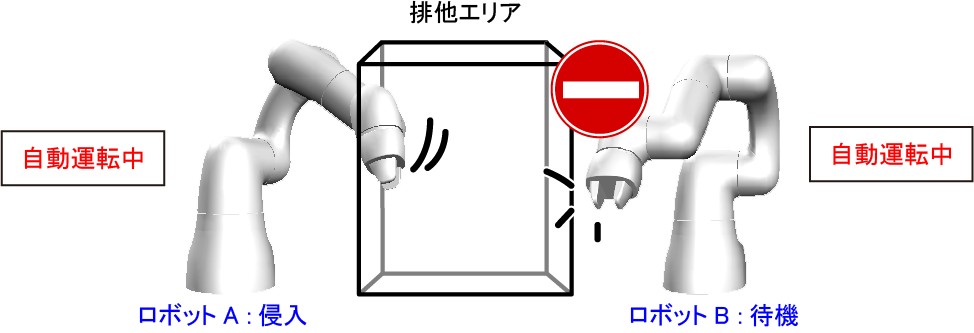
ロボットAが侵入し、ロボットBが待機している状態。
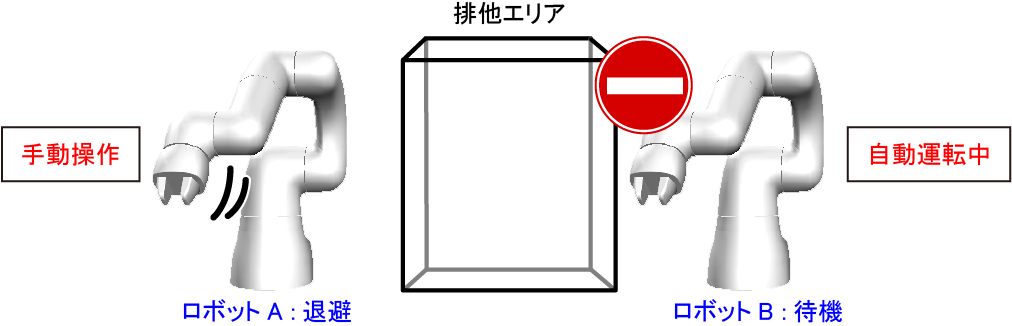
2
ロボットAを手動操作で、エリア外へ退避させる。この時、ロボットAが切替え前の(エリア内に侵入している)状態を保持しているので、ロボットBは待機を継続する。
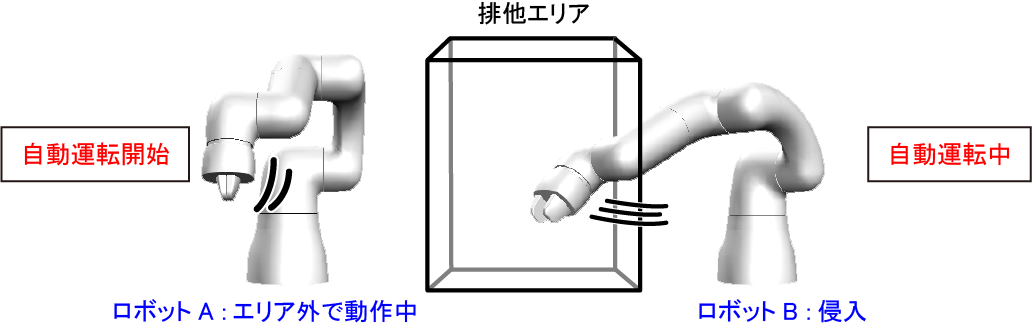
3
ロボットAを自動運転状態にする。この時、ロボットAがエリア外にいる状態に切替わるので、ロボットBが侵入開始する。
排他エリア重なり時の注意
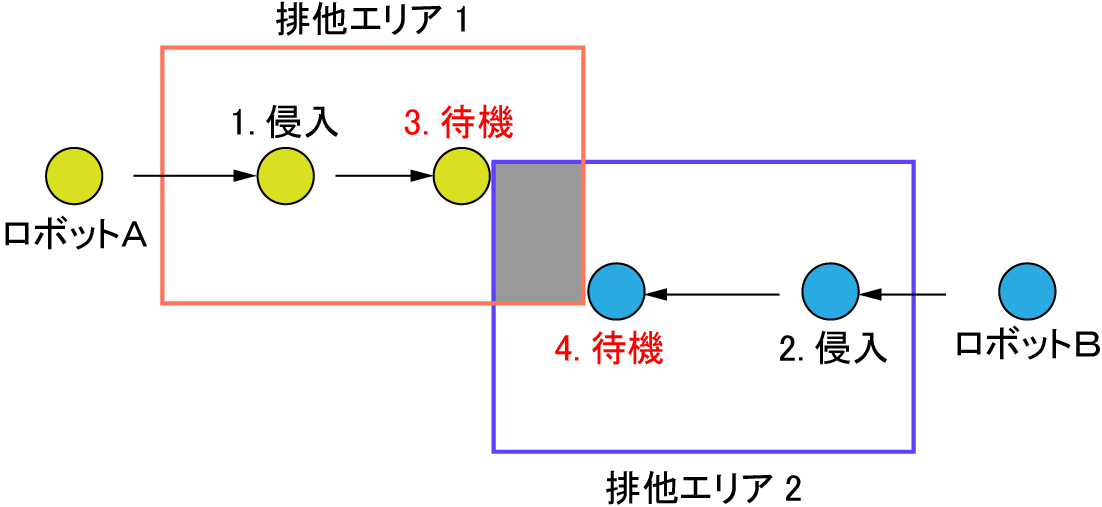
排他エリアが重なる場合は、ロボット同士が待機状態になり、動かなくなってしまいます。
また、排他エリア同士が近い場合も、動かなくなる可能性があります。
動かなくなる例
- ロボットAが排他エリア1に侵入する。
- ロボットBが排他エリア2に侵入する。
- ロボットAが排他エリア2に侵入しようとするが、ロボットBが入っているため、ロボットAは待機する。
- ロボットBが排他エリア1に侵入しようとするが、ロボットAが入っているため、ロボットBも待機してしまう。
待機タイムアウト発生時の解除方法
排他エリアに侵入中のロボットを手動操作でエリア外に退避させ、自動運転状態に切替えることで、排他エリアにロボットが侵入している情報がクリアされます。その後、動かしたいロボットを自動運転させてください。
- 待機タイムアウトでエラーが発生し停止したロボットは、手動操作でのみ動作可能です。
- 待機タイムアウトでエラーが発生し停止したロボットを移動させるだけでは、動作は開始できません。
- 待機タイムアウトでエラーが発生し停止したロボットを別のプログラムに切替えても、そのままでは動作は開始できません。
- 待機タイムアウトでエラーが発生したまま、更に待機状態が一定時間続くと、再度待機タイムアウトでエラーが発生します。ロボットの状態は監視の有効によって更新されるため、退避後は自動運転を行うか、リモートTP/バーチャルTPの排他制御画面にて、[F7 監視開始]を押してください。
0x84201563「排他エリア現在値侵入検知」が発生する場合
短時間で排他エリアへ侵入、退避するような排他エリアをかすめる動作を行うと、本エラーが発生する可能性があります。
下記の対策でエラーの発生を軽減できます。ただし、排他制御機能と電流制限機能、b-CAPスレーブを併用すると、停止予測位置が正確に求められないため、本対策でエラーを回避できない場合があります。
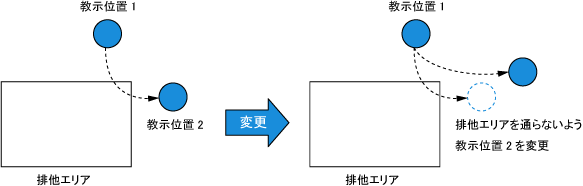
対策1
排他エリアをかすめる動作や短時間で侵入と退避をする動作を行わないように、教示位置および動作経路を修正する。
対策2
排他エリアのサイズを変更する。
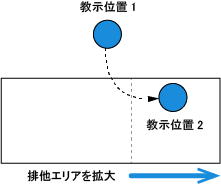
拡大する場合
待機時などの教示位置も排他エリア内に収まるように、排他エリアを拡大する。
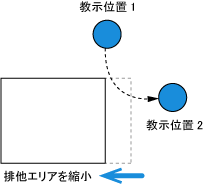
縮小する場合
ロボット動作時に排他エリアをかすめないような大きさになるように、排他エリアを縮小する。
ID : 6966