
ID : 6972
排他通信設定と排他監視設定
各ロボットでマスタ/スレーブの設定を行います。
排他通信設定
操作経路 : 基本画面 - [F2 アーム] - [F6 補助機能] - [F11 排他制御]

[F2 排他通信設定]を押して画面を開きます。
マスタ/スレーブロボットで行う設定
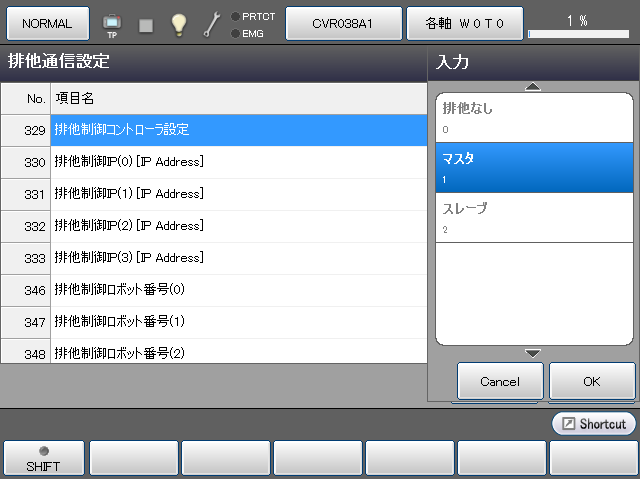
[排他制御コントローラ設定]を選択し[F5 編集]を押すと、マスタ/スレーブが選択できるようになります。
マスタロボットは [1 : マスタ]を、スレーブロボットは[2 : スレーブ]を選択して[OK]を押します。
| 番号 | 項目名 | 単位 | 初期値 | 内容 |
|---|---|---|---|---|
| 329 | 排他制御コントローラ設定 | - | 0 |
ご使用のロボットをマスターロボットまたはスレーブロボットに設定します。 0:排他なし 1:マスタ 2:スレーブ |
マスタロボットでの設定
マスタロボットの場合は、さらに通信設定を行います。
操作経路 : 基本画面 - [F2 アーム] - [F6 補助機能] - [F11 排他制御] - [F2 排他通信設定]
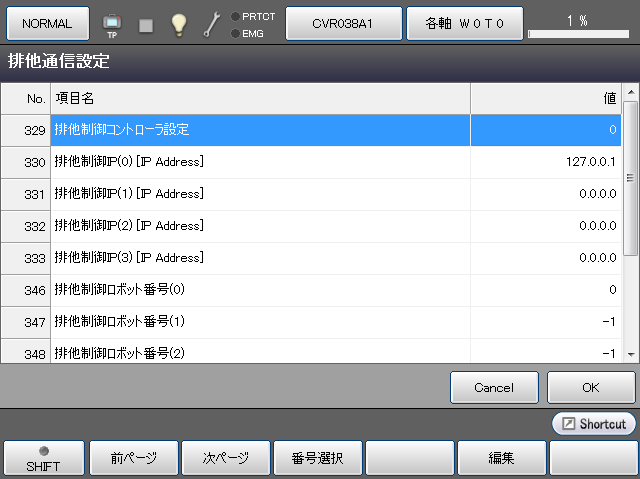
[F5 編集]ボタンでテンキーを開き、排他制御機能の対象となるロボットのIPアドレスを入力して[OK]を押します。
IPアドレスに[0.0.0.0]を入力すると、排他グループから外すことができます。
パラメータ一覧
| 番号 | 項目名 | 単位 | 初期値 | 内容 |
|---|---|---|---|---|
| 330 | 排他制御IP(0)[IP Address] | - | 127.0.0.1 | マスタロボットのIPアドレスを設定します。 マスタロボットを排他グループに入れる場合は初期値のまま使用してください。排他グループから外す場合は[0.0.0.0]を入力してください。 |
| 331 | 排他制御IP(1)[IP Address] | - | 0.0.0.0 | スレーブロボットのIPアドレスを設定します。 |
| 332 | 排他制御IP(2)[IP Address] | - | 0.0.0.0 | スレーブロボットのIPアドレスを設定します。 |
| 333 | 排他制御IP(3)[IP Address] | - | 0.0.0.0 | スレーブロボットのIPアドレスを設定します。 |
| 346 | 排他制御ロボット番号(0) | - | 0 | マスタロボットの番号を設定します。 |
| 347 | 排他制御ロボット番号(1) | - | -1 | スレーブロボットの番号を設定します。 |
| 348 | 排他制御ロボット番号(2) | - | -1 | スレーブロボットの番号を設定します。 |
| 349 | 排他制御ロボット番号(3) | - | -1 | スレーブロボットの番号を設定します。 |
| 362 | 排他制御コントローラ起動待ち時間[sec] | sec | 30 |
マスタロボットが、スレーブロボットの起動完了を待つ時間を設定します。 |
| 367 | 排他制御待機タイムアウト時間[sec] | sec | 300 | 排他制御中にロボットが待機する時間の上限値を設定します。待機時間がこの値を越えるとエラー[0x83201567:排他制御待機タイムアウト]が発生します。 |
排他監視設定
必要に応じてマスタ/スレーブロボットで設定を行います。
この操作を行うにはユーザレベルをメンテナに設定してください。
操作経路 : 基本画面 - [F2 アーム] - [F6 補助機能] - [F11 排他制御] - [F3 排他監視設定]

[F3 排他監視設定]を押して画面を開きます。
[F5 編集]ボタンでテンキーを開き、監視周期を入力して[OK]を押します。
| 番号 | 項目名 | 単位 | 初期値 | 内容 |
|---|---|---|---|---|
| 363 | 排他制御監視周期 | ms | 40 | 監視周期を設定します。 |
監視周期タイムアウトが発生した場合、まず監視モデルを減らしてください。効果がない場合は、パラメータ[363 : 排他制御監視周期]を40msから延ばしてください。
ID : 6972