
ID : 6969
WINCAPSIIIでの監視モデル設定
WINCAPSIIIのアームモデリング機能で監視モデルを作成します。
マスタロボットおよび、各スレーブロボットで行う必要があります。
監視モデルデータのCOBOTTAへの送信は、次ステップ "WINCAPSIIIでの排他エリア設定" の中で、排他エリアと一緒に行います。
ログインレベルはプログラマです。
監視モデル作成時の制約
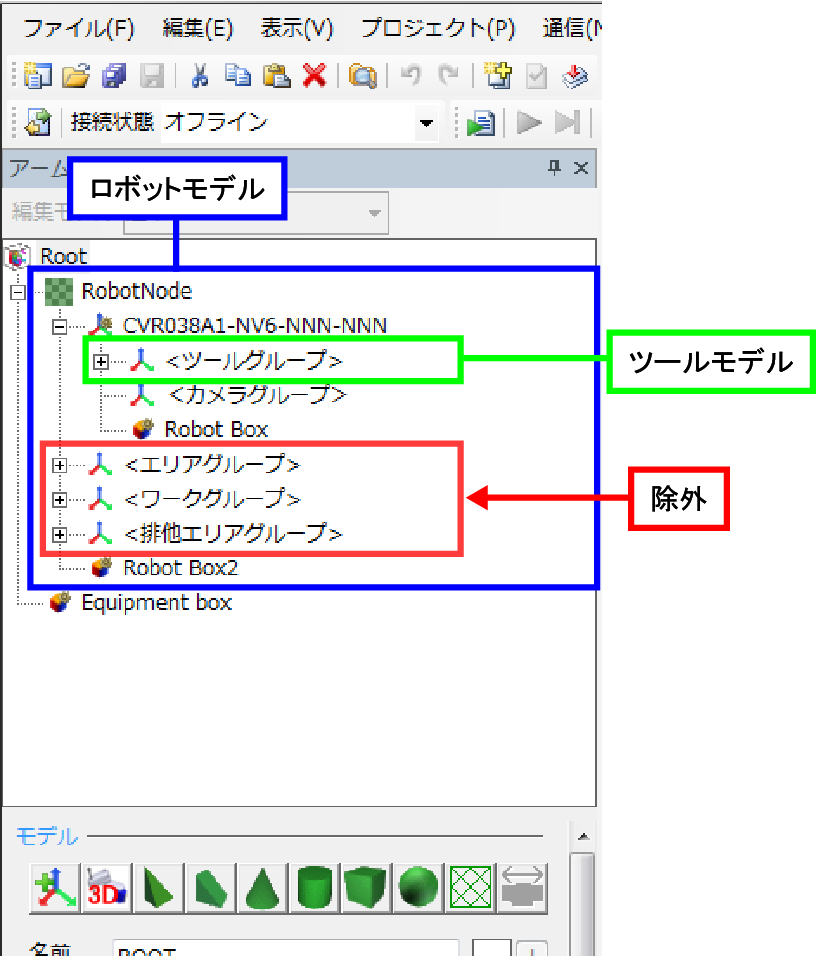
各監視モデルは指定の階層に作成してください。
プロジェクト作成時に[コントローラオプションの選択]で、ハンドを[電動グリッパ]にした場合はツールグループに、カメラを[Canon]にした場合はカメラグループにオブジェクトが自動で作成されます。
| 監視モデル名 | 制約 | 詳細 |
|---|---|---|
| ロボットモデル | Robot Node以下で、ツールグループ、エリアグループ、ワークグループ、排他グループ以下を除くオブジェクト。 | - |
| ツールモデル | ツールグループ以下のオブジェクト。 | ツール番号以下のツールモデルはツール番号変更後、有効になります。 ツールグループ直下のツールモデルは常時監視対象です。 |
監視モデルの作成手順
ロボット監視モデルは自動的に作成されているため、ユーザはツール監視モデルのみ作成します。
1
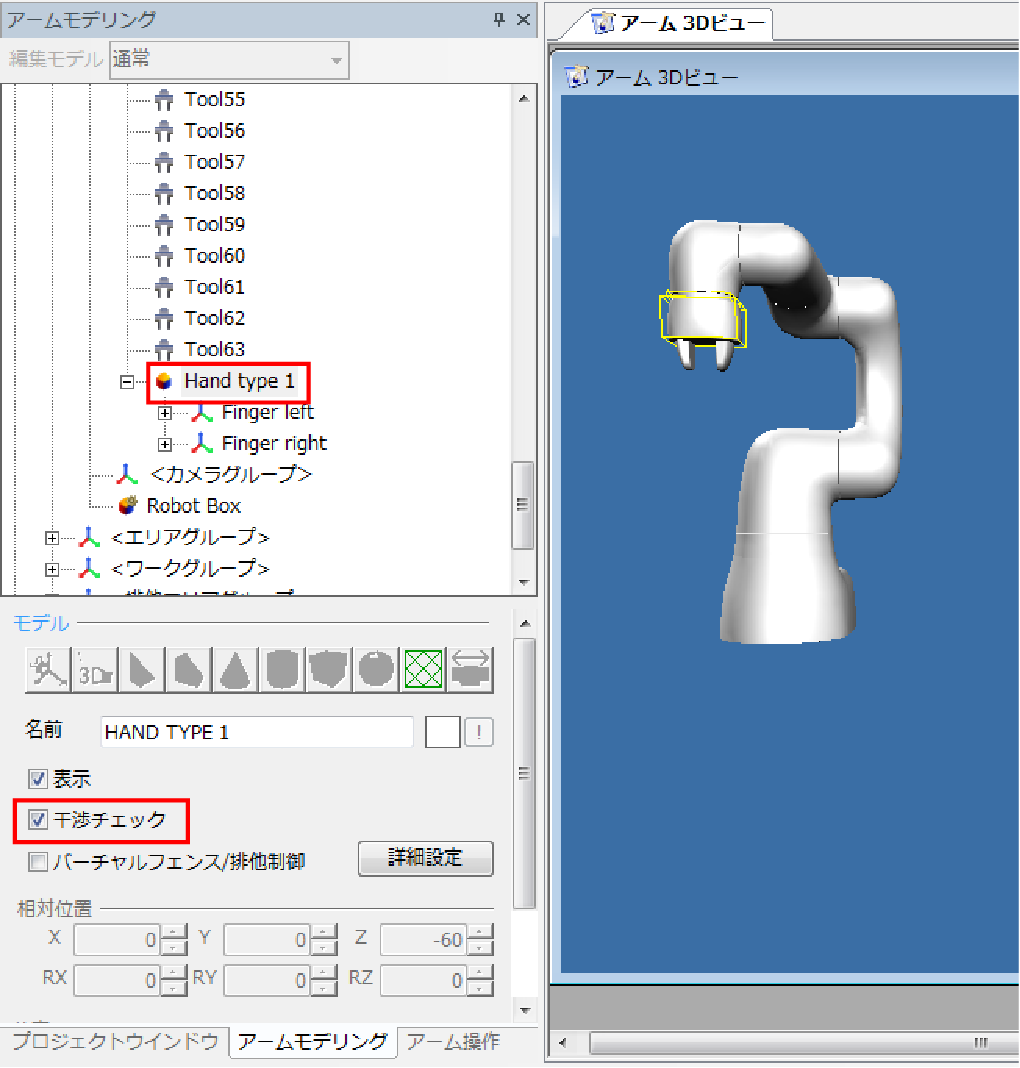
WINCAPSIIIのアームモデリング機能でモデルを作成します。
2
対象のオブジェクトを選択し、[干渉チェック]を有効にします。
3
[詳細設定]から[モデル詳細設定]を開き、[バーチャルフェンス/排他制御]を有効にします。
[検出範囲表示]を有効にすると監視モデルが表示されます。
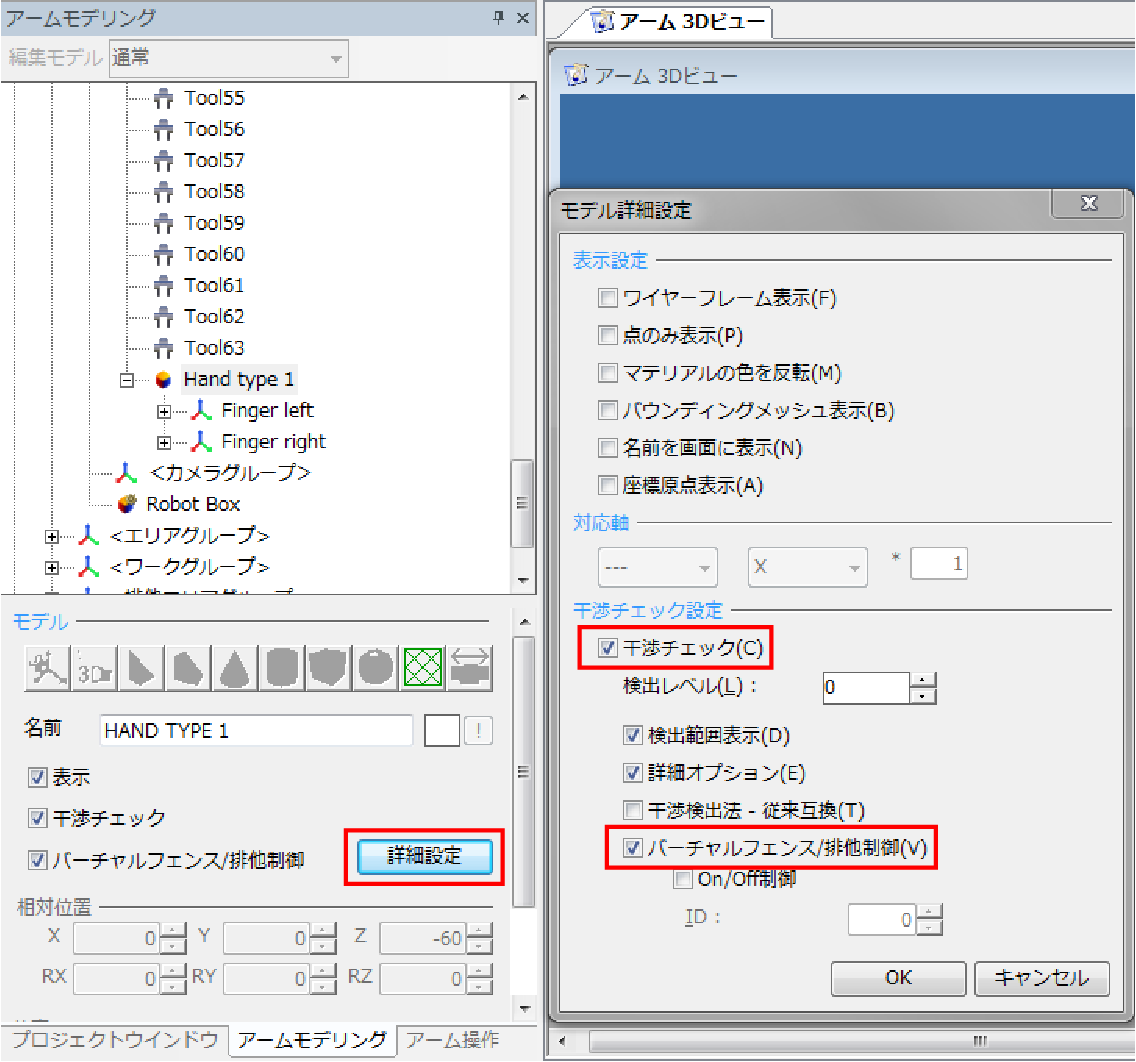
ロボットは常に干渉チェックが有効になっています。
4
検出レベルを設定します。
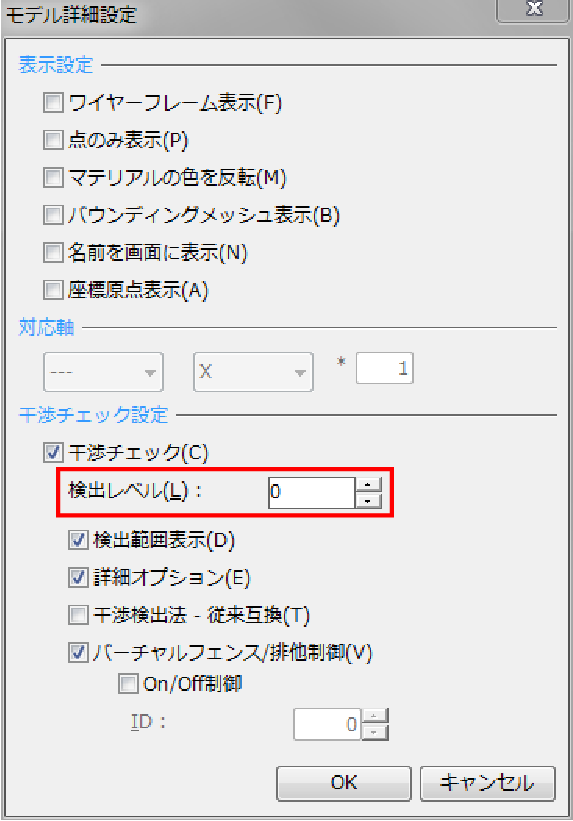
レベルを高くすると、精度がよくなり細かい監視ができるようになりますが、高くしすぎると処理時間が長くなり、処理時間遅延エラーが発生する可能性があります。
5
監視したい全てのモデルについて、STEP2からSTEP4を繰り返します。
6
排他制御のデータをCOBOTTAで処理できるデータに変換、保存します。
メニュー[アーム] - [バーチャルフェンス/排他制御データ出力]
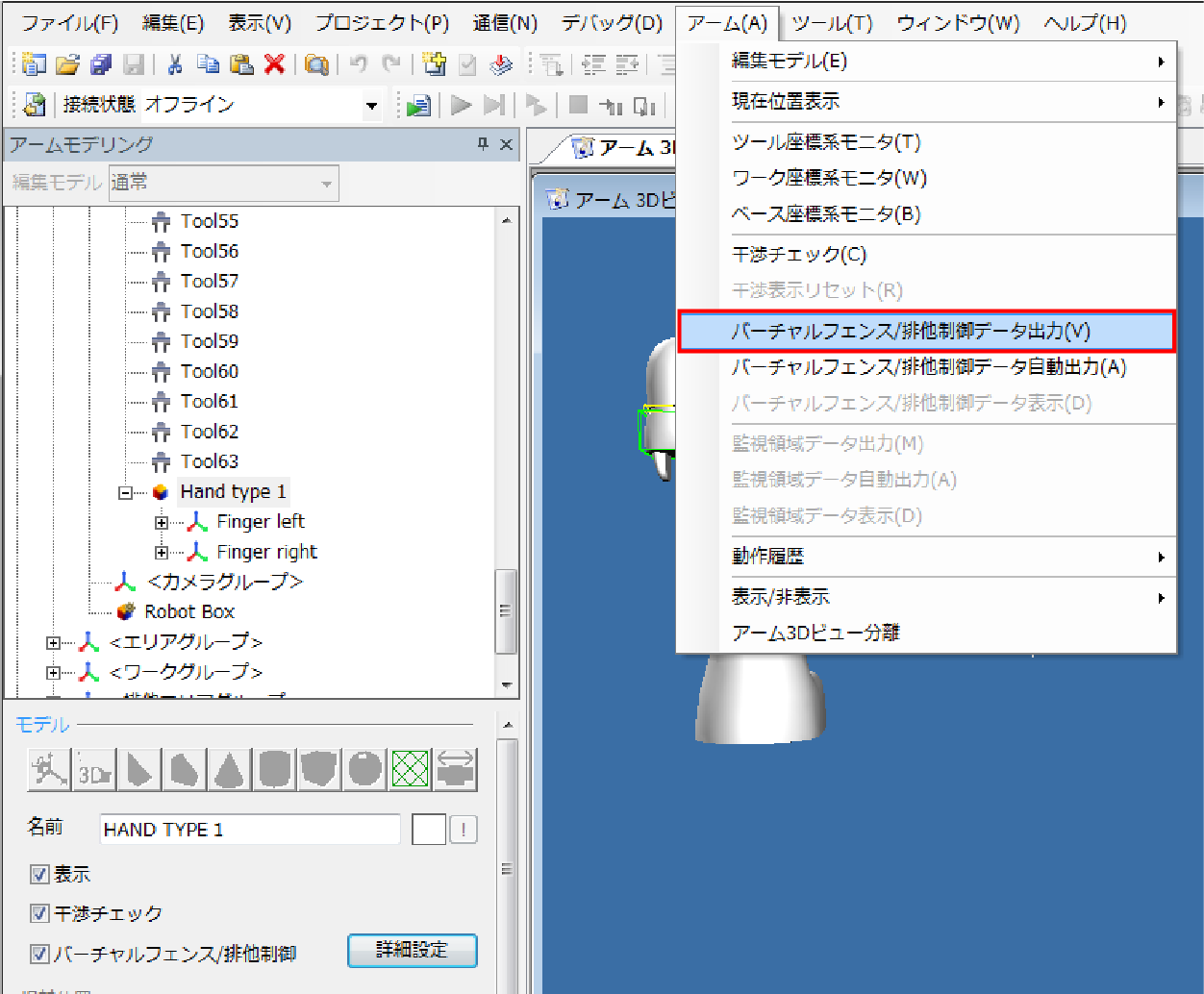
出力した排他制御のデータを確認したい場合は、メニュー[アーム] - [バーチャルフェンス/排他制御データ表示]で確認することができます。
7
監視モデルのデータは、排他エリアデータと一緒に送信しますが、排他エリアデータをリモートTP/バーチャルTPまたはプログラムで作成する場合は、ここで監視モデルデータをCOBOTTAへ送信します。
送信の詳細は "WINCAPSIIIでの排他エリア設定" を参照してください。
ID : 6969