
ID : 11084
セットアップ手順
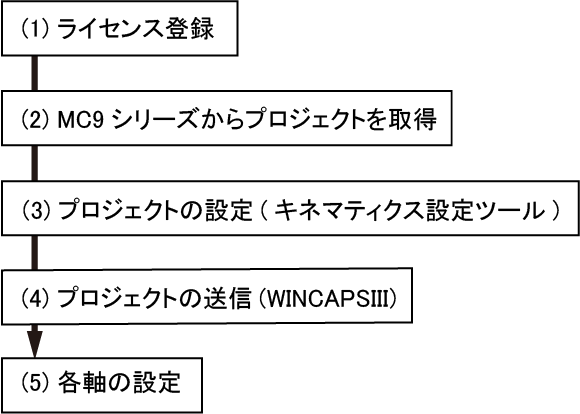
「(2)プロジェクトを取得」前に、「(5)各軸の設定」を行うことも可能です。
(1)ライセンス登録
この機能はオプション機能のため、各コントローラにライセンスの登録が必要です。
スマートTPを使用して行います。
入力操作については、「ライセンス登録」を参照してください。
ロボットタイプ X、XY、XYZ、XYZTのキネマティクスは、MC9シリーズの標準機能として搭載されています。そのため、ライセンスが無い状態でも利用可能です。
ライセンスが無い状態の場合は「ロボット軸範囲の設定」で選択した軸数に応じて、X、XY、XYZ、XYZT のキネマティクスが自動で設定されます。(例えばロボット軸範囲として4軸を選択した場合は、XYZT のキネマティクスが内部的に設定されます。)
(2)MC9シリーズからプロジェクトを取得
キネマティクス設定を行いたいMC9シリーズからWINCAPSIIIを利用してプロジェクトを取得します。
プロジェクトの取得方法はこちらをご覧ください。
(3)プロジェクトの設定(キネマティクス設定ツール)
WINCAPSIIIで取得したプロジェクトを、キネマティクス設定ツールで開き、設定を行います。
(4)プロジェクトの送信(WINCAPSIII)
キネマティクス設定ツールで設定を行ったプロジェクトから、WINCAPSIIIを利用してパラメータ送信を行います。
(5)各軸の設定
ロボットを動作させるために、各軸を軸毎に設定します。
付加軸取扱説明書の「付加軸を立ち上げるには」の手順をすべて行ってください。
パラレルリンクロボットを使用する場合は、上記の手順に加えて、パラメータの設定が必要な項目があります。詳しくは「パラレルリンクロボットの追加設定パラメータ」を参照してください。
また、アームパラメータの設定についてはMC9シリーズ製品情報の「アームパラメータの設定」を参照してください。
制御系のゲインパラメータを設定する際、オートゲインチューニングの実施条件を満たさない場合はマニュアルゲインチューニングを実施してください。
詳細は付加軸取扱説明書の「オートゲインチューニング実施方法」を参照してください。
ID : 11084
- このページに関連する情報
- プロジェクトの設定
- アーム長設定
- 4軸または6軸ロボットの追加設定