
ID : 11085
プロジェクトの設定
キネマティクス設定機能を利用して、お客様が用意したロボットをMC9シリーズで動作させる場合、キネマティクス設定ツールを使ってWINCAPSIIIのプロジェクトを編集します。
キネマティクス設定ツールはWINCAPSIIIをインストールするときに、一緒にインストールされます。
手順
1
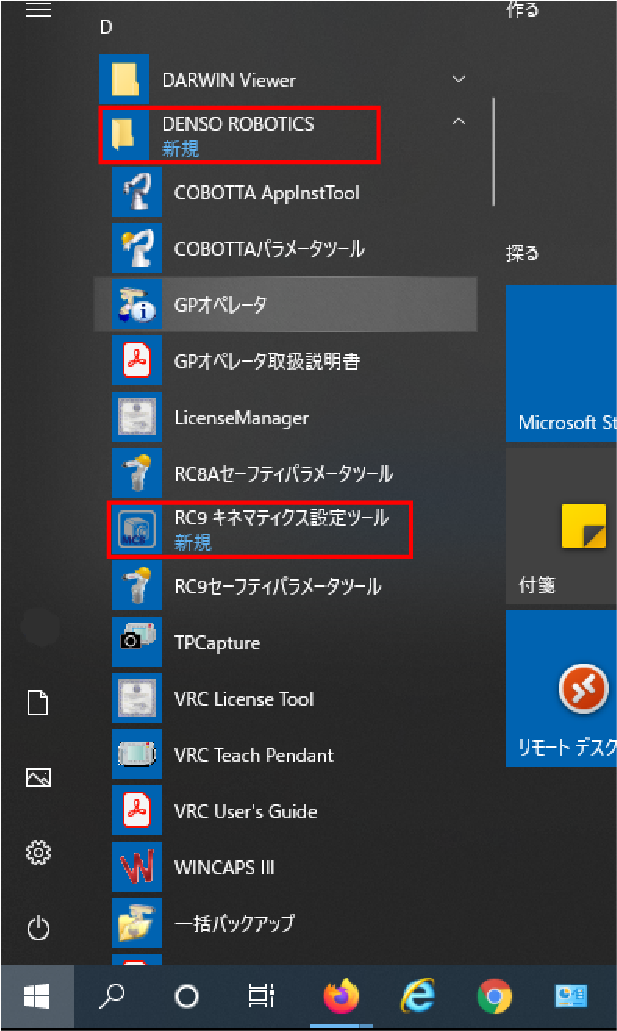
キネマティクス設定ツールを立上げます。
操作経路:PC[スタート]ボタン - [DENSO ROBOTICS] - [RC9キネマティクス設定ツール]
2
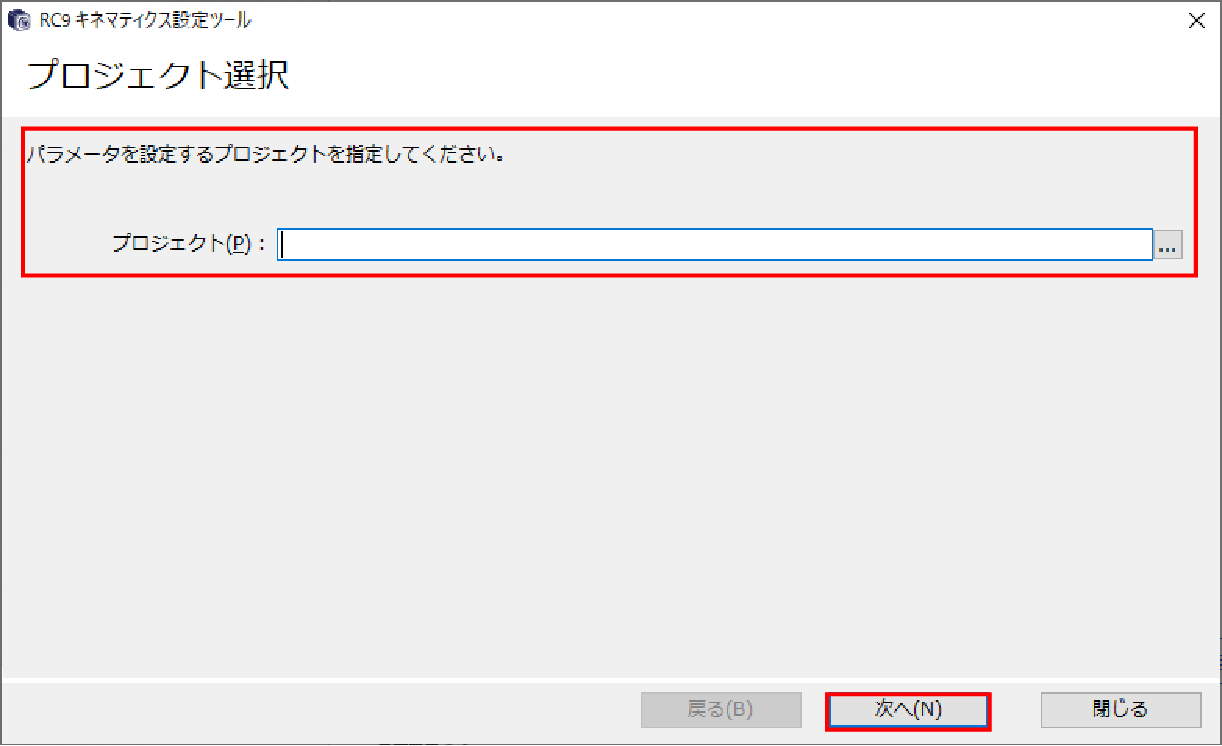
キネマティクス設定を行いたいMC9シリーズから取得した、プロジェクトを選択し、[次へ]を押します。
3
動作させたいロボットの形状を選択し、[次へ]を押します。
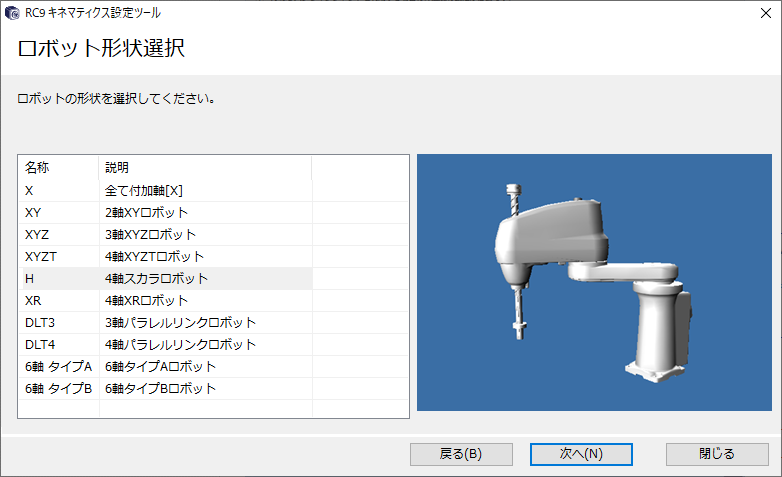
選択できるロボットの形状については「ロボットタイプ」を参照してください。
4
選択したロボットタイプに応じてアーム長を設定し、[次へ]を押します。
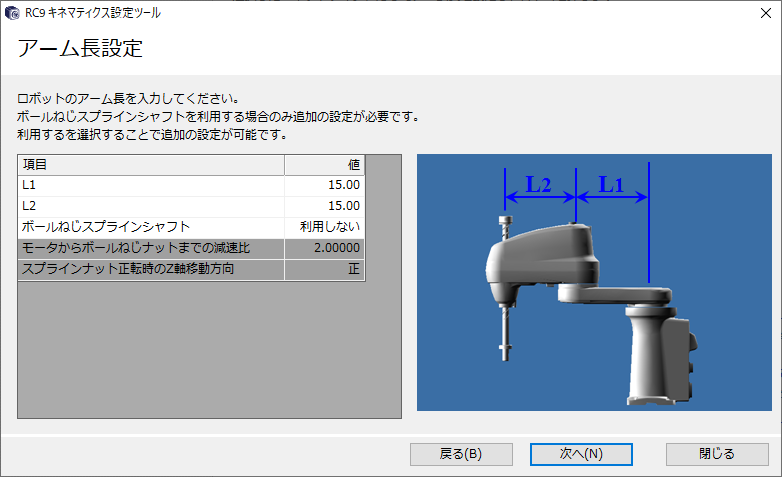
- アーム長として入力する値には制限があります。アーム長の各項目については「アーム長設定」を参照してください。
- 4軸ロボットで直動軸にボールねじスプラインシャフトを利用するか、6軸ロボットで5軸の動作が6軸に干渉する機構を利用する場合は、追加のパラメータ設定が必要です。詳しくは「4軸または6軸ロボットの追加設定」を参照してください。
5
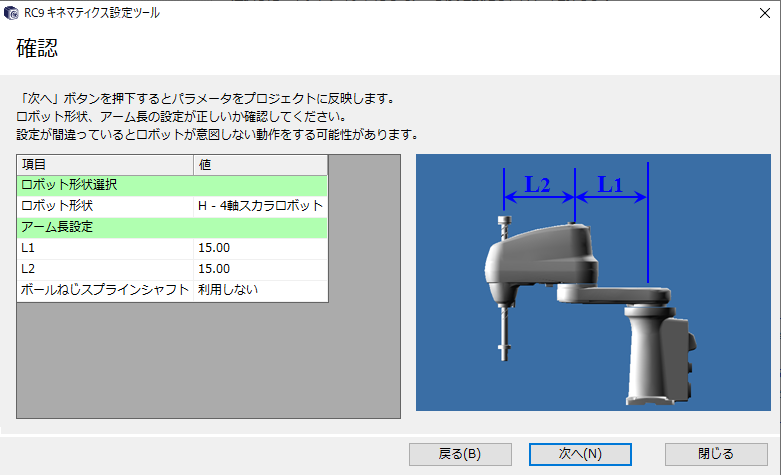
確認画面で設定内容を確認し、[次へ]を押します。
設定が間違っていた場合、ロボットが意図しない動作をする可能性があります。
必ず、設定が間違っていないことを確認してください。
6
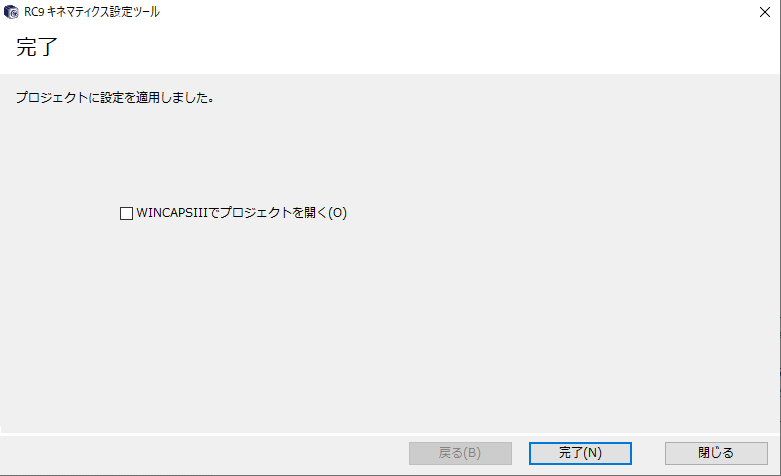
[完了]を押し、プロジェクトへのキネマティクス設定は終了です。
「WINCAPSIIIでプロジェクトを開く」にチェックをすると、[完了]を押したあとにWINCAPSIIIが立上がります。
ID : 11085