
ID : 11087
パラメータの送信
キネマティクス設定を行ったプロジェクトをWINCAPSIIIで開き、必要なパラメータをコントローラへ送信します。
送信後はスマートTPを使用して正しく設定されているかを確認してください。
1
データをコントローラへ送信します。
MC9シリーズへは、プロジェクト内のパラメータのみを送信します。
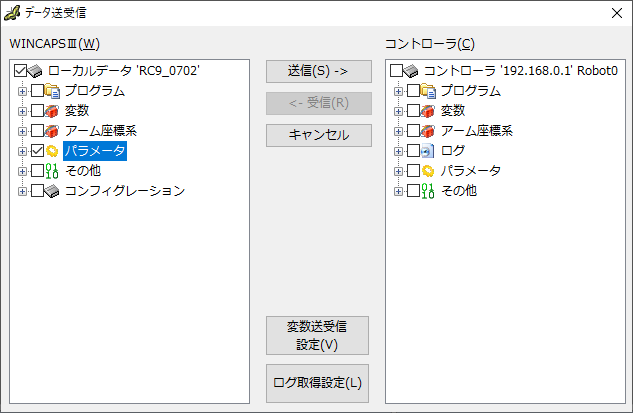
「通信」メニューから「データ送受信」を選択し、「データ送受信」ダイアログを表示します。
「データ送受信」ダイアログ上で、パラメータチェックボックスにチェックを入れ、送信ボタンを押します。
詳細については、WINCAPSIIIガイドの「通信設定」および「データの送受信」を参照してください。
データ送信後、コントローラを再起動してください。
この作業を行うには、コントローラとWINCAPSIIIが通信可能になっている必要があります。
通信設定の方法については、WINCAPSIIIガイドの「ロボットコントローラとの通信」を参照してください。
2
スマートTPでアーム画面を開きます。
画面上部のロボット型式のボタンを押すと、選択したロボットタイプが表示されます。
表示されない場合は、キネマティクス設定ツールで再設定を行ってください。
ロボットタイプが表示されるのはコントローラがMC9シリーズで、ライセンスが有効な時だけです。
ID : 11087