
ID : 11079
アームパラメータの設定
各軸を協調させた状態でCP動作(直線)を行なうときに設定します。
スマートTPによる設定
1
基本画面 - [F2 アーム] - [F12 保守] - [F10 軸設定] - [F2 アーム設定]を押します。
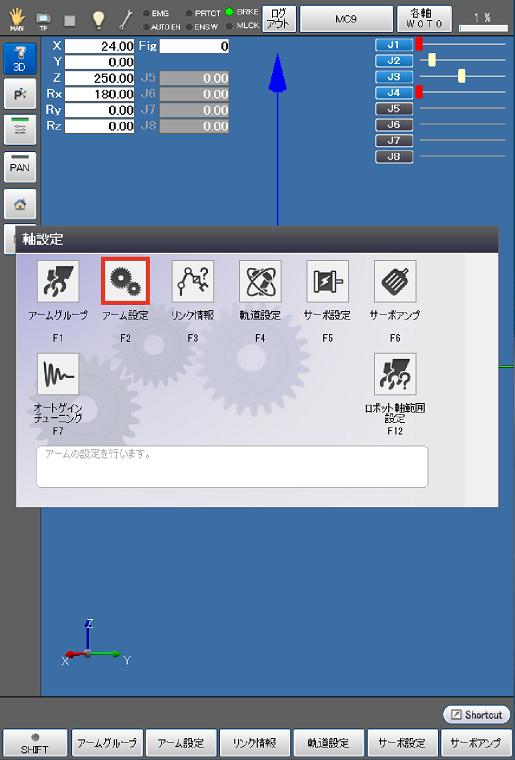
「アーム設定」画面が表示されます。
2
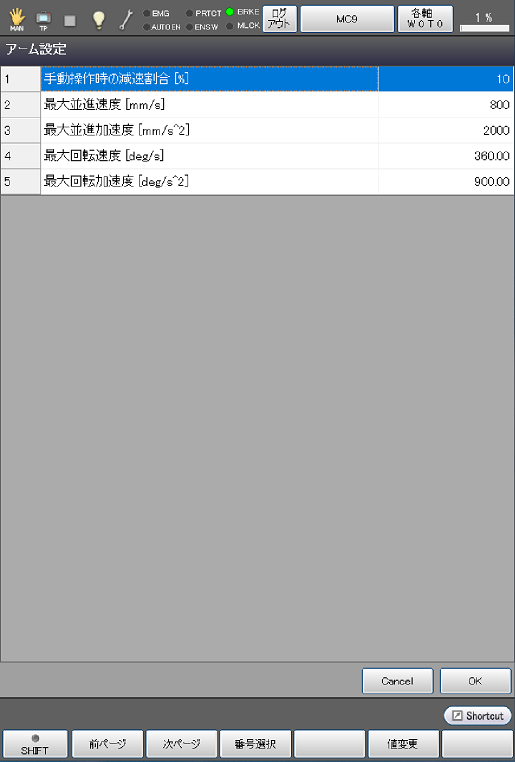
アームパラメータの各設定を変更し、[OK]を押します。
各パラメータの詳細は、以下の「アームパラメータ一覧」を参照してください。
3
すべてのアームパラメータの設定が完了後、[OK]を押します。
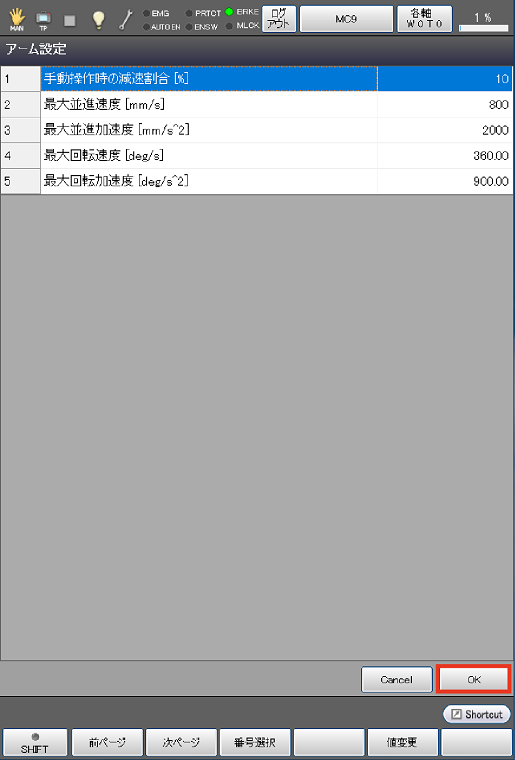
登録したアームパラメータの設定が保存され、「軸設定」画面に戻ります。
手動操作時の減速割合はスマートTPのみで設定可能です。
WINCAPSIIIによる設定
1
操作経路:[プロジェクト] - [軸設定表]を選択します。
「軸設定」画面が表示されます。
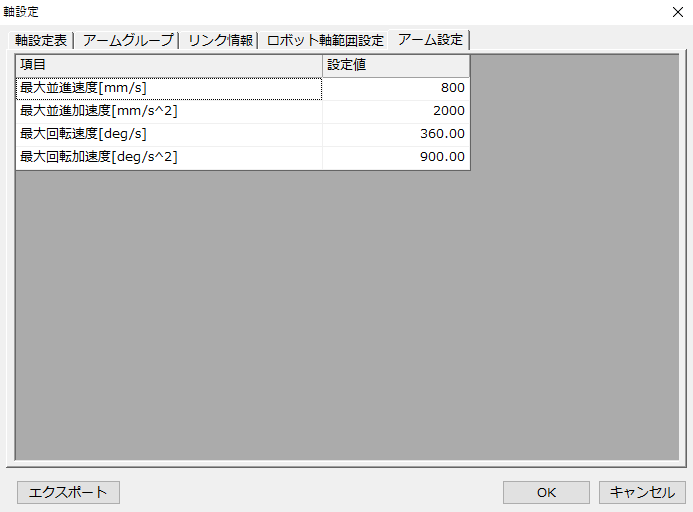
[アーム設定]タブを選択します。
パラメータを設定し、[OK]を押します。
2
[通信] - [データ送受信]を選択し、「データ送受信」画面を表示します。
WINCAPSIII - [パラメータ] - [アーム パラメータ]を選択し、コントローラに送信します。
パラメータ設定後のコントローラ電源の再投入は不要です。
アームパラメータ一覧
| パラメータの名称 | 設定範囲 | 出荷設定値 | 単位 | 内容 |
|---|---|---|---|---|
| 手動操作時の減速割合 | 1~50 | 10 | % | 手動操作時の速度を自動時の10%以下に制限してください。 |
| 最大並進速度 | 1~100000000 | 800 | mm/s | CP動作時の最大並進速度を設定します。 |
| 最大並進加速度 | 1~100000000 | 2000 | mm/s2 | CP動作時の最大並進加速度を設定します。 |
| 最大回転速度 | 0.01~1000000 | 360.00 | deg/s | CP動作時の最大回転速度を設定します。 |
| 最大回転加速度 | 0.01~1000000 | 900.00 | deg/s2 | CP動作時の最大回転加速度を設定します。 |
ID : 11079
- このページに関連する情報
- 手動操作時の減速割合の設定