
ID : 7520
编程构成
Rockwell公司制造的PLC的特征
Rockwell公司制造的PLC是保持断开电源前的状态的规格。
为此,如果因为停电等使PLC的电源被断开,处理中途的AOI维持保存状态不变。如果重新接通电源,再次开始处理,AOI从电源被断开前的状态开始处理。
根据机器人的状态,可能执行预料不到的动作。
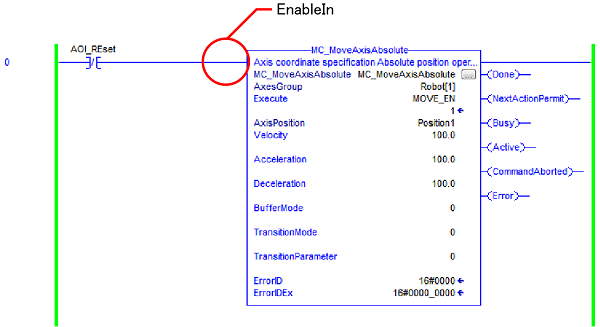
对策是先将AOI的EnableIn设为“FALSE”,API内部的处理被复位。
编程构成图
使用Command-Slave功能,在“Rockwell 5000”中创建的程序构成如下所示。
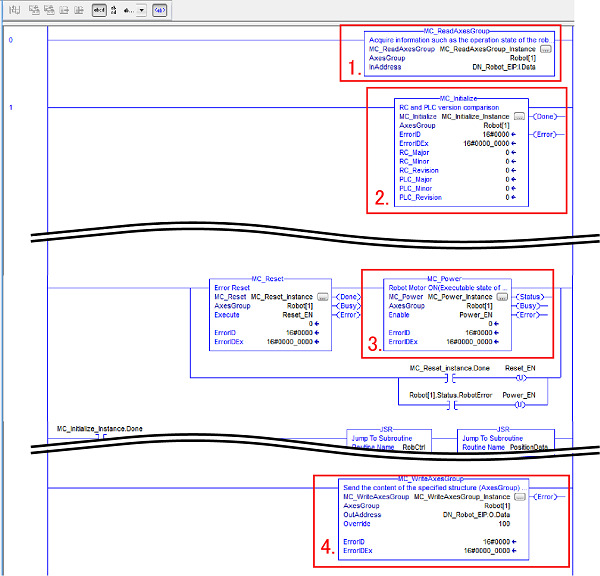
1.MC_ReadAxesGroup
从机器人控制器获取机器人的动作状况等的数据,存储在“AxesGroup”中。通过这个AOI获取的数据用于通过Command-Slave的其他AOI控制机器人。
因此,使用Command-Slave功能时,请一定将这个AOI配置到程序的开始位置。
AOI的详细内容请参照Command-Slave参考指南的_Rockwell的“MC_ReadAxesGroup”。
2.MC_Initialize
获取PLC和机器人控制器的Command-Slave的版本,检查是否一样。
如果PLC和机器人控制器的Command-Slave版本不一致,有机器人不正确动作的可能性。另外,最初的通信以后可监视PLC和机器人控制器是否正常通信。
因此,在配置"MC_ReadAxesGroup"以外的AOI前,请配置这个AOI。
AOI的详细内容请参照Command-Slave参考指南的_Rockwell的“MC_Initialize”。
3.MC_Power
将AOI范畴"动作"的AOI设为可执行状态,接通机器人的电机。在执行AOI范畴“动作”的AOI前,必须通过这个AOI设为可执行状态。
因此,请在AOI范畴“动作”的AOI前配置这个AOI。
AOI的详细内容请参照Command-Slave参考指南的_Rockwell的“MC_Power”。
4.MC_WriteAxesGroup
将通过Command-Slave的其他AOI更新的“AxesGroup”内的指令发给机器人控制器。机器人控制器接受从这个AOI发来的指令,控制机器人。
因此,使用Command-Slave功能时,请一定将这个AOI配置到程序的最后。
AOI的详细内容请参照Command-Slave参考指南的_Rockwell的“MC_WriteAxesGroup”。
ID : 7520