
ID : 2161
带力感应器的依从功能的调整步骤
按照以下步骤实施。
- 首先设定控制力和控制百分比。
- 慢慢调小假想粘性(Damper)并进行调整。
- 基本无需更改假想惯性(Mass)和假想弹性(Spring)。
- 可通过多功能教导器或指令调整参数。如果两种方式并用,则可能会因混乱导致设定错误,因此建议统一使用一种方式进行设定。
- 想控制的方向和Move命令等的机器人动作命令的动作方向一致时,无法以指定的力进行控制,因此请在移动至想开始进行控制的位置后,通过MotionSkip跳过机器人动作命令。
(1)控制力、控制百分比的设定
通过多功能教导器或指令设定控制力和控制百分比。
| 参数 | 设定值 |
|---|---|
| 目标控制力 | 设定目标的力/力矩 |
| 控制百分比 | 将对象方向设为100%。其它设为0% |
通过多功能教导器设定时
关于操作方法,请参照“参数的设定”。
通过指令设定时
使用ForceParam指令。
(例)在表编号1、工具坐标系中沿Z方向以30N进行推压动作时
ForceParam 1, 1, P(0,0,30,0,0,0), Rate=P(0,0,100,0,0,0)(2)慢慢调小假想粘性(Damper)的同时进行调整
通过实物调整可实现理想振幅和结束时间的假想粘性。进行实际动作,通过力量控制Log的图表进行确认。
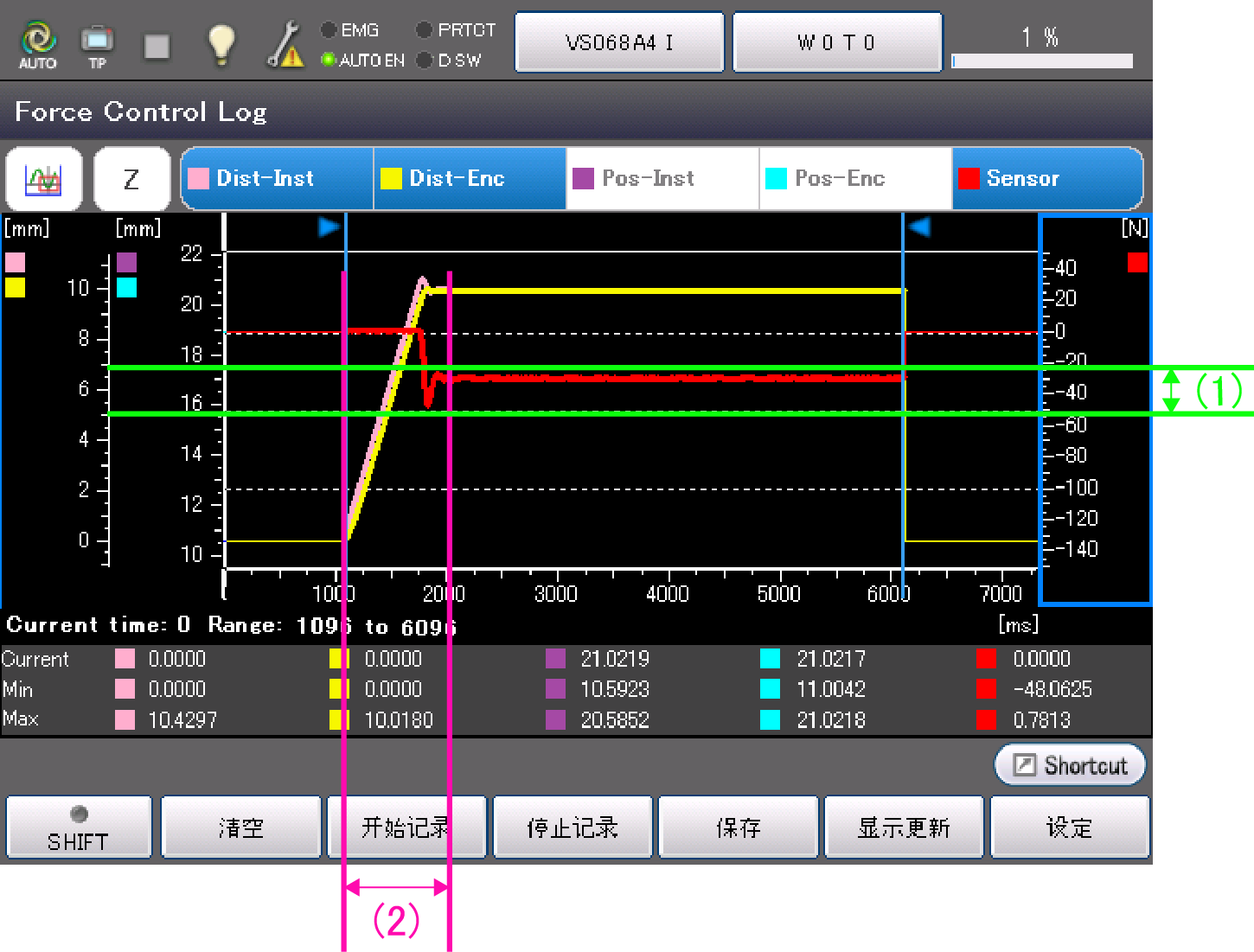
| 编号 | 确认项目 |
|---|---|
| (1) | 振幅是否在理想目标值±允许值范围内 |
| (2) | 是否在理想时间内结束 |
关于力量控制Log,请参照“力量控制Log的获取、显示、保存”。
振动、动作速度的变化
操作假想粘性时,振动和动作速度按照下表进行变化。
| 假想粘性 | 振动 | 动作速度 |
|---|---|---|
| 增大 | 减少 | 减少 |
| 减小 | 增加 | 增加 |
| 假想粘性 | 状态 |
|---|---|
| 100% | 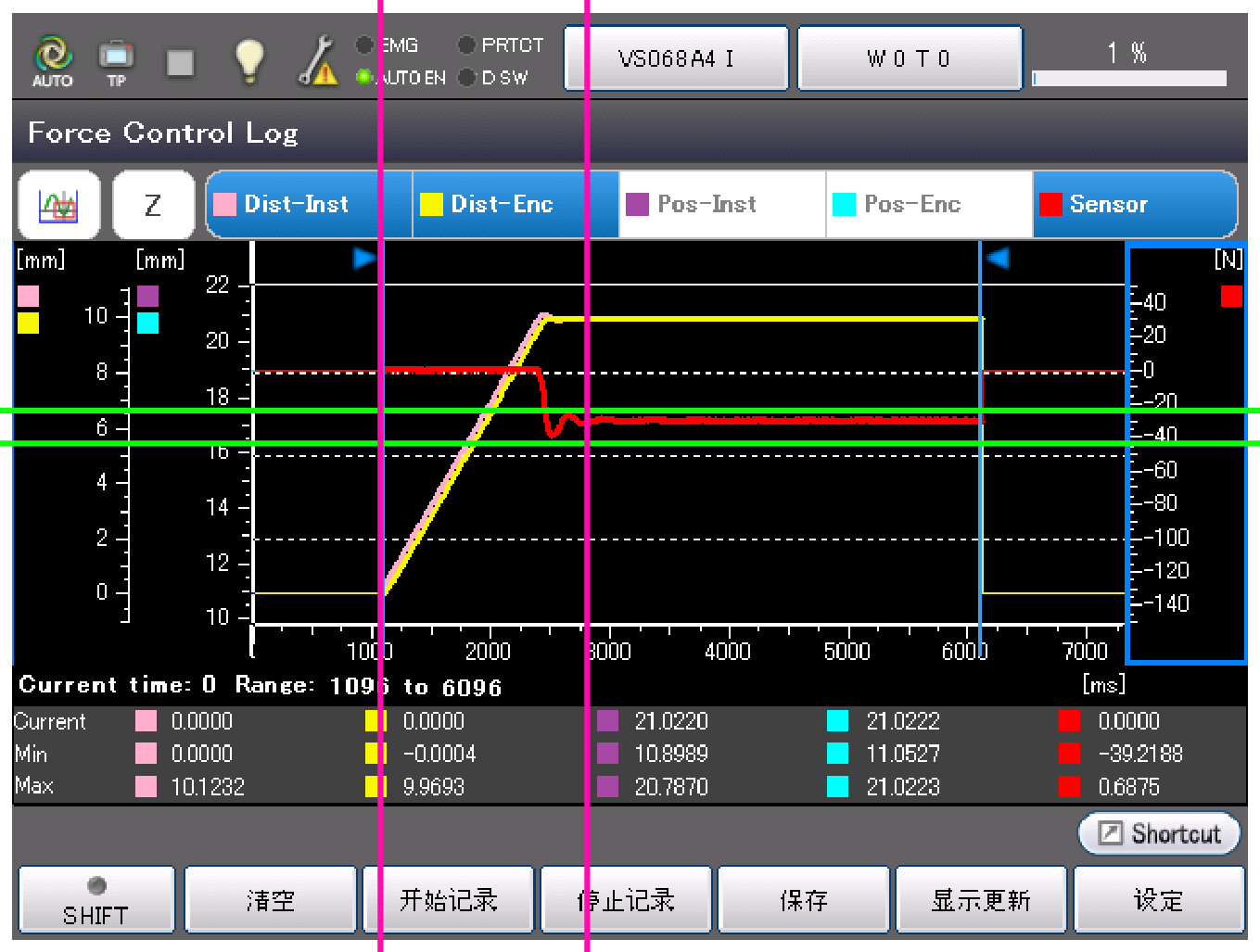 |
| 50% | 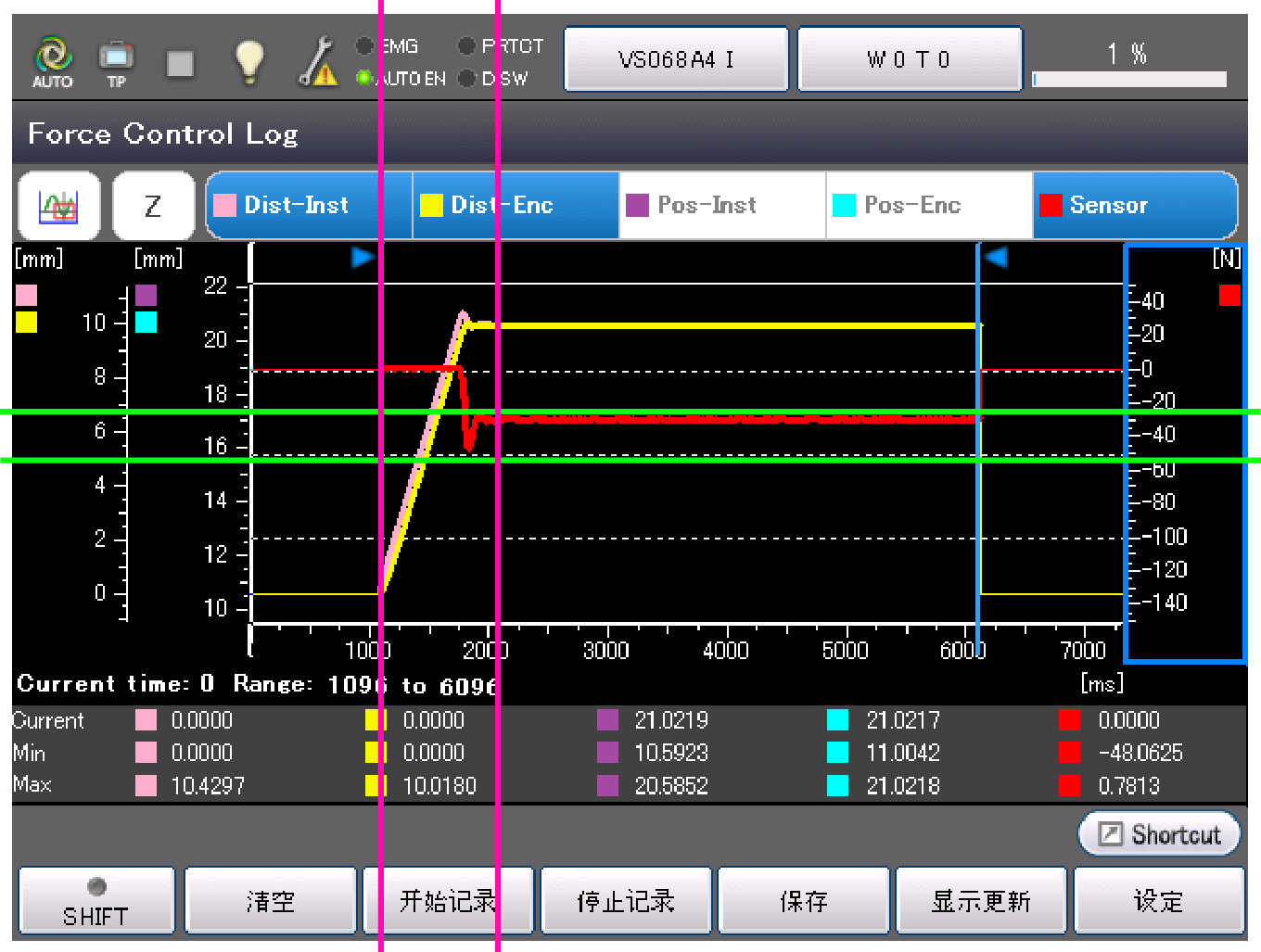 |
| 30% | 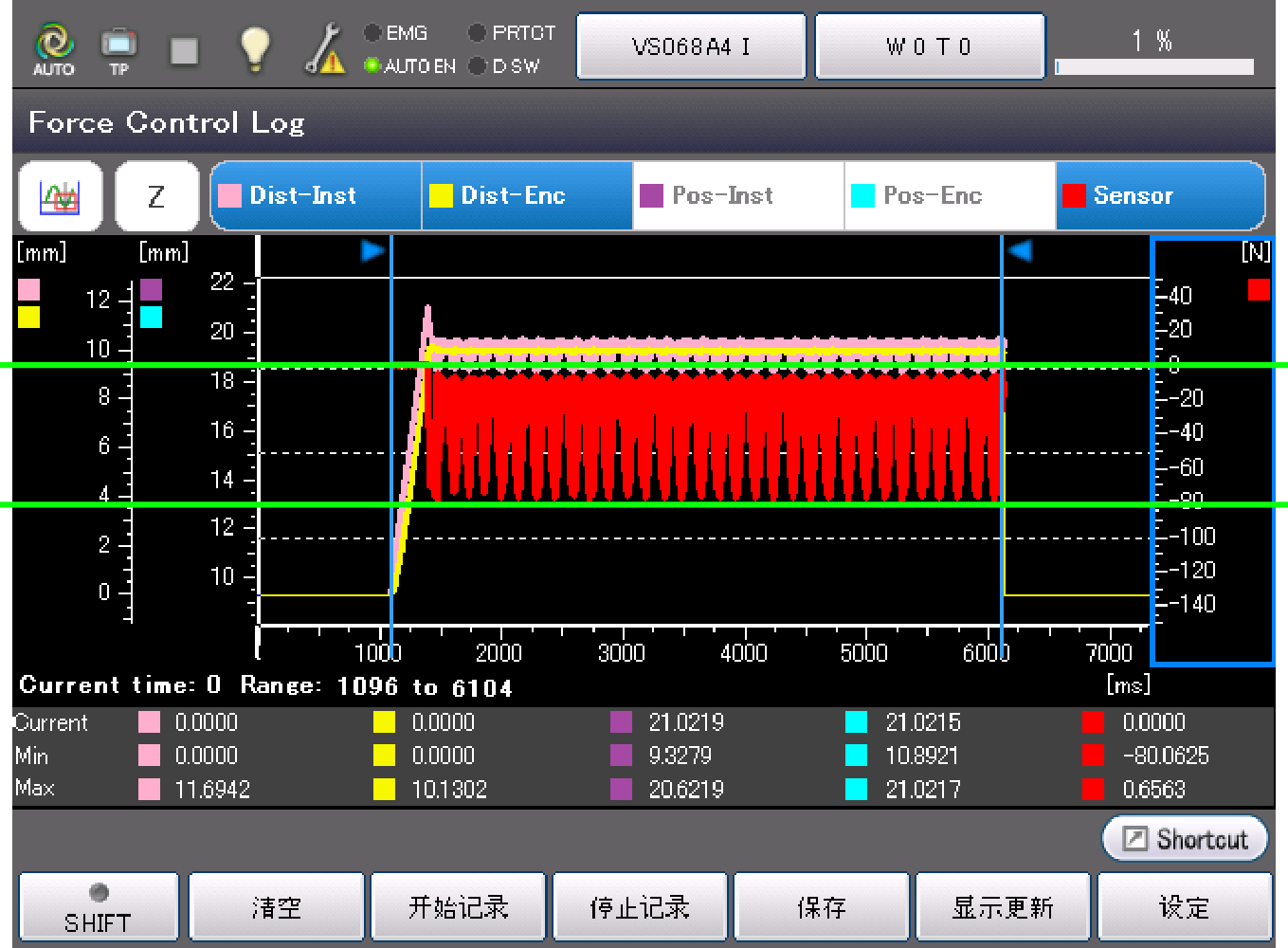 |
调整时的注意事项
- 基本上,操作假想粘性,假想惯性和假想弹性保留原来的值进行调整。
- 请注意如果输入假想弹性的值,则无法按照目标值进行推压动作。
- 由于设定会发生振动的假想粘性时,会导致无法进行力量控制,因此请勿设定更小的假想粘性。
ID : 2161