
ID : 5331
设置步骤
概要
以下叙述传送带跟踪/附加轴跟踪的设置步骤的概要。
(1)硬件的选择
执行“传送带、装置的选择”、“设定编码器轴编号”、“I/O设定”。
(2)硬件的连接确认
执行“轴、I/O确认”。
(3)校准
对于传送带、传感器(视觉传感器)、机器人,计测各自的正确的位置关系。
详细步骤
传感器跟踪、视觉跟踪详细的设定步骤不同。
关于传感器跟踪,请参照“传感器跟踪的设置”。
关于视觉跟踪,请参照“视觉跟踪的设置”。
附加轴跟踪时,设置前需要设置附加轴。详细内容请参照“附加轴起动步骤(滚珠丝杠)”。
向现有的机器人控制器添加传送带跟踪功能
向现有的机器人控制器添加传送带跟踪功能时,需要传送带跟踪功能的许可证、编码器集线器等。
详细内容请咨询本公司营业。
向机器人控制器添加传送带跟踪功能时,有时由用户将机器人控制器的项目数据改为附加轴要能够项目。
此时,请按照下述步骤实施。
将项目数据改为附加轴用项目的步骤
通过WINCAPSIII从机器人控制器获取数据,改为附加轴用项目后,将数据发给机器人控制器。
1
使用WINCAPSIII。
| 操作路径:[文件]-[新建项目] |
选择“从控制器侧获取信息,并新建”,创建数据。
详细情况请参照“新建项目”。
2
| 操作路径:[项目]-[属性] |
通过项目信息标签的[附加轴变更]按钮,改为“有附加轴”。
详细情况请参照“项目信息”标签的“机器人”。
3
| 操作路径:[通信]-[发送接收数据] |
选择WINCAPSIII的本地数据,按“发送”。
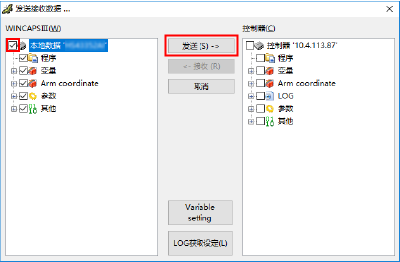
发送完成后,请重新启动控制器。
ID : 5331