
ID : 5285
调整方法
概要
执行程序,未能达到预期结果时,参考“力量控制监视画面”的结果调整参数。
- 调整时请首先设定“目标控制力”和“电流限制值”。
- 可通过多功能教导器或指令调整参数。如果两种方式并用,则可能会因混乱导致设定错误,因此建议统一使用一种方式进行设定。
调整步骤
1
按压基本画面-[F2 机械臂]-[F2 力量控制]。
显示“力量控制监视画面”后,确认结果并决定参数的调整项目。

“力量控制监视画面”中显示的项目详情,请参照下表。
| 项目名 | 详情 |
|---|---|
| 控制力 | 以编码器值为基础,通过位置和姿势显示机器人控制的力度(所受外力+不受外力状态下机器人控制所需的力)。 |
| 偏差 | 在图表中显示各轴当前位置和目标位置的偏差。 |
| 清空最大值 | 清空[控制力]及[偏差]中显示的最大值。 |
关于各图表的确认方法,左右两端的位置表示最大和最小。中间显示的数值是当前值。
2
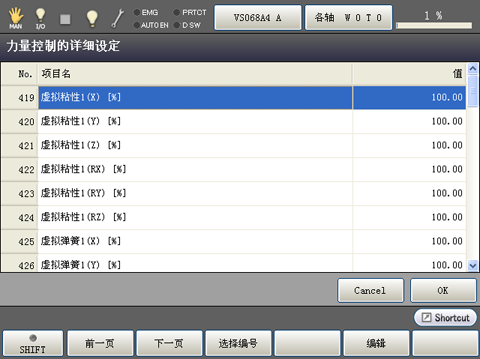
按压“力量控制监视画面”的[F6 设定]或[F12 详细设定],打开“力量控制设定画面”或“力量控制的详细设定画面”。
设定步骤1中确定的参数。
3
再次执行程序,确认是否达到预期结果。
反复执行步骤1、2,直至达到预期结果。
ID : 5285