
ID : 3422
机器人夹套、信号线、气动配管的设置方法
进行机器人的搬运和设置时,请务必阅读“安全使用的注意事项”的“设置上的注意事项”和本章。
设置的准备
要设置本食品用机器人夹套,请在确认“夹套套件的构成内容”之上,将必要的部件准备在手上。
针对机器人夹套的设置,按照下表的顺序进行说明。
| 作业流程 (参照位置) |
概要 |
|---|---|
| 法兰盘的安装 | 在机器人本体上安装食品用机器人夹套用法兰。 |
| 信号线、导向、配线 | 安装保护夹治具信号线及气动配管所需的罩子、导向。 另外,将夹治具信号线及气动配管穿过电缆地线,固定在夹套用法兰上。 |
| 夹套的穿戴 | 将食品用机器人夹套罩在机器人夹套上。 |
| 机器人基础部附近的固定 | 根据用途,使用绳子固定机器人基础部附近的夹套,或者需要安装提升板。 |
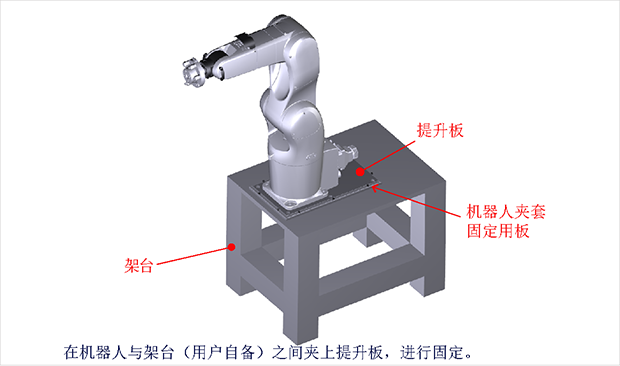
机器人的提升板
想防止粉尘等从机器人的底面进入时,如下图所示,需要在机器人与架台(用户准备)之间安装提升板。
在提升板上需要有机器人设置螺栓用孔和决定设置位置的定位销用孔。
请确认以下的提升板图纸和机器人夹套固定板图纸,以正确的尺寸加工。
ID : 3422
- 本页相关信息
- 法兰的安装
- 信号线、导向、配线
- 夹套的穿戴
- 机器人基础部附近的固定