
ID : 3423
法兰的安装
1
在机器人本体上安装食品用机器人夹套用法兰。
安装法兰时,如果置于以下的轴角度的姿势,将易于安装。
| 轴 | 角度 | |
|---|---|---|
| J1轴 | 0° |  |
| J2轴 | 0° | |
| J3轴 | 90° |
|
| J4轴 | 0° |
|
J5轴 |
-90° | |
| J6轴 | 0° | |
2
如果是标准型号的机器人,在6轴部固定6轴十字辊保护罩。
防溅型号的机器人不需要。
安装时,请使用同包装附带的十字螺钉(M3×10)。
- 安装螺钉尺寸:M3×10
- 螺钉紧固力矩:0.59Nm +/-20%
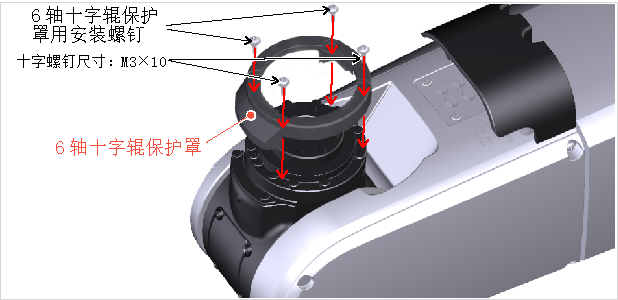
不安装保护罩时,机器人的运动会使夹套、配线损伤,导致夹套的寿命降低。
3
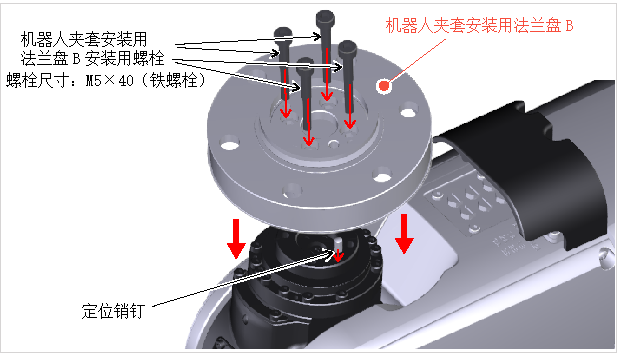
请用附带的螺栓及定位销固定机器人夹套安装用法兰B。
螺栓的尺寸和紧固力矩如下所述。
- 安装螺钉尺寸:M5×40mm
- 螺栓紧固力矩:5.9Nm +/-20%
安装法兰时,请用酒精等对外表面进行脱脂处理,然后安装。
4
请用附带的螺栓固定机器人夹套安装用法兰A。
螺栓的尺寸和紧固力矩如下所述。
- 安装螺栓尺寸:M5×30mm
- 螺栓紧固力矩:5.2Nm +/-20%
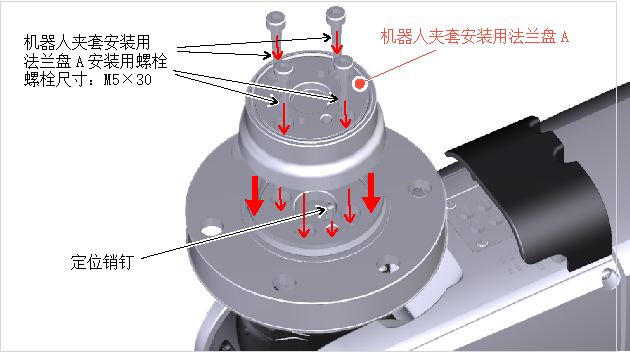
在法兰A的背面附带有密封(橡胶),与法兰B对准,可使法兰A与法兰B紧密贴合。
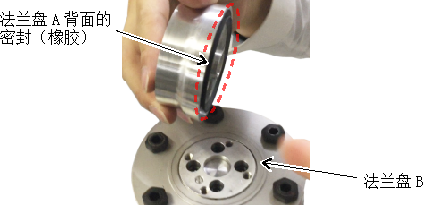
装配法兰A时,请如上述STEP3所示,针对法兰B的安装面笔直安装,注意避免法兰A的密封(橡胶)被压瘪。
5
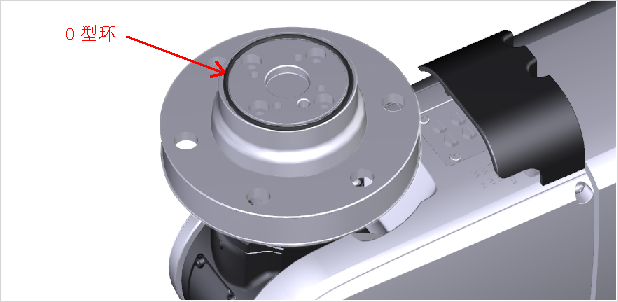
在法兰A上安装O型环。(是水滴可能附着在机器人夹治具周边的环境时)
请以Rz6.3(Ra1.6)设计O型环接触面的表面粗糙度。另外,在接触面精加工中,请不要进行进给加工。不满足条件时,如果在夹套安装在机器人上的情况下用洗涤剂等液体清洗,液体可能进入机器人夹套内部。
ID : 3423