
ID : 3374
IAI PCON控制
概要
可用指令控制IAI PCON系列。Ver.2.7.*及更高版本可使用该功能。
系统构成
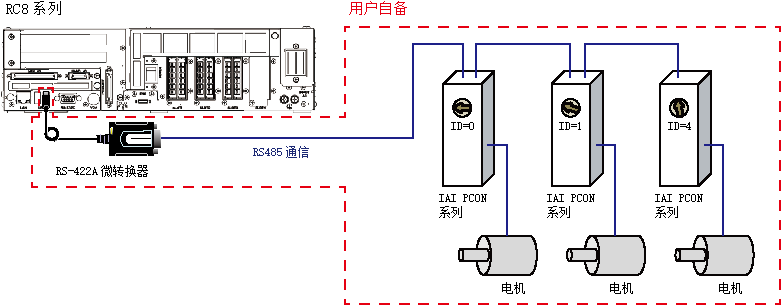
通过RS485通信连接RC8与IAI PCON(下称PCON)。
如果在RC8上连接RS-422A微型转换器,能够进行RS485通信。虽然也可用RS485板进行RS485通信,但是由于通信方法不同,请不要使用RS485板。
虽然可用菊花链连接多台PCON,但是需要在设定中避免各个PCON的ID重复。使用指令时,为了识别各个PCON,使用ID。
许可证
要使用此功能,需要IAI PCON插件许可证。
关于许可密匙的输入,请参照选项的“许可证登录”。
设定步骤
请使用WINCAPSIII或多功能教导器,如下所示设定机器人控制器的“VRC”参数。关于操作的详细内容,请参照“参数的设定”或“VRC设定”。
| No. | 项目名 | 设定值 |
|---|---|---|
| 84 | IAI 有效无效设定 | 有效 |
| 94 | IAI 设备地址0有效无效 | 有效 |
| 110 | IAI 设备地址0机种类 | 2 (PCON) |
指令一览
有下表的一些指令。
为IAI*的*指定进行控制的PCON的编号。
| 指令名称 | 功能 | IAI公司的指令符号 |
|---|---|---|
| IAI*.ReadAlarmInfo | 获取最后发生的报警信息。 | ALAO, ALCO, ALTO |
| IAI*.ReadPositionData | 获取位置数据。 | PCMD, INP, VCMD, ZNMP, ZNLP, ACMD, DCMD, PPOW, LPOW, CTLF |
| IAI*.ReadCurrentPosition | 获取当前位置。 | PNOW |
| IAI*.ReadCurrentAlarmCode | 获取现在发生的报警代码。 | ALMC |
| IAI*.ReadDSS1 | 获取装置状态寄存器1的值。 | DSS1 |
| IAI*.ReadDSS2 | 获取装置状态寄存器2的值。 | DSS2 |
| IAI*.ReadDSSE | 获取扩展装置状态寄存器的值。 | DSSE |
| IAI*.SwitchServo | 进行伺服的ON/OFF。 | SON |
| IAI*.ResetAlarm | 复位报警。 | ALRS |
| IAI*.Pause | 进行暂停的执行和解除。 | STP |
| IAI*.Home | 执行原点复位。 | HOME |
| IAI*.SwitchJogInching | 切换JOG/微动动作。 | JISL |
| IAI*.GetCurrentPositionData | 导入位置数据。 | TEAC |
| IAI*.JogPlus | 朝原点反方向执行JOG/微动动作。 | JOG+ |
| IAI*.JogMinus | 朝原点方向执行JOG/微动动作。 | JOG- |
| IAI*.SwitchPIOModbus | 切换Modbus指令的有效/无效。 | PMSL |
| IAI*.Stop | 减速停止。 | STOP |
| IAI*.MovePTP | 朝数值指定的移动目标移动。 | PCMD, INP, VCMD, ACMD, PPOW, CTLF |
| IAI*.WritePositionData | 写入位置数据。 | PCMD, INP, VCMD, ZNMP, ACMD, PPOW, LPOOW, CTLF |
使用例子
'!TITLE "IAI Sample:PCON ID=1"
Sub Main
' 解除警告
IAI1.ResetAlarm False
IAI1.ResetAlarm True
' Modbus指令有效
IAI1.SwitchPIOModbus False
IAI1.SwitchPIOModbus True
' 伺服ON
IAI1.SwitchServo True
'初始位置移动
IAI1.Home False
IAI1.Home True
Delay 3000
' 5.00mm移动
IAI1.MovePTP 500, 10, 1000, 30, 0, 8 '目标位置500x0.01mm
Delay 1000
' -5.00mm移動
IAI1.MovePTP -500, 10, 1000, 30, 0, 8 '目标位置 -500x0.01mm
Delay 1000
' 伺服OFF
IAI1.SwitchServo False
' Modbus指令无效
IAI1.SwitchPIOModbus False
End SubID : 3374