
ID : 3056
EtherCAT Slave Motion
功能概要
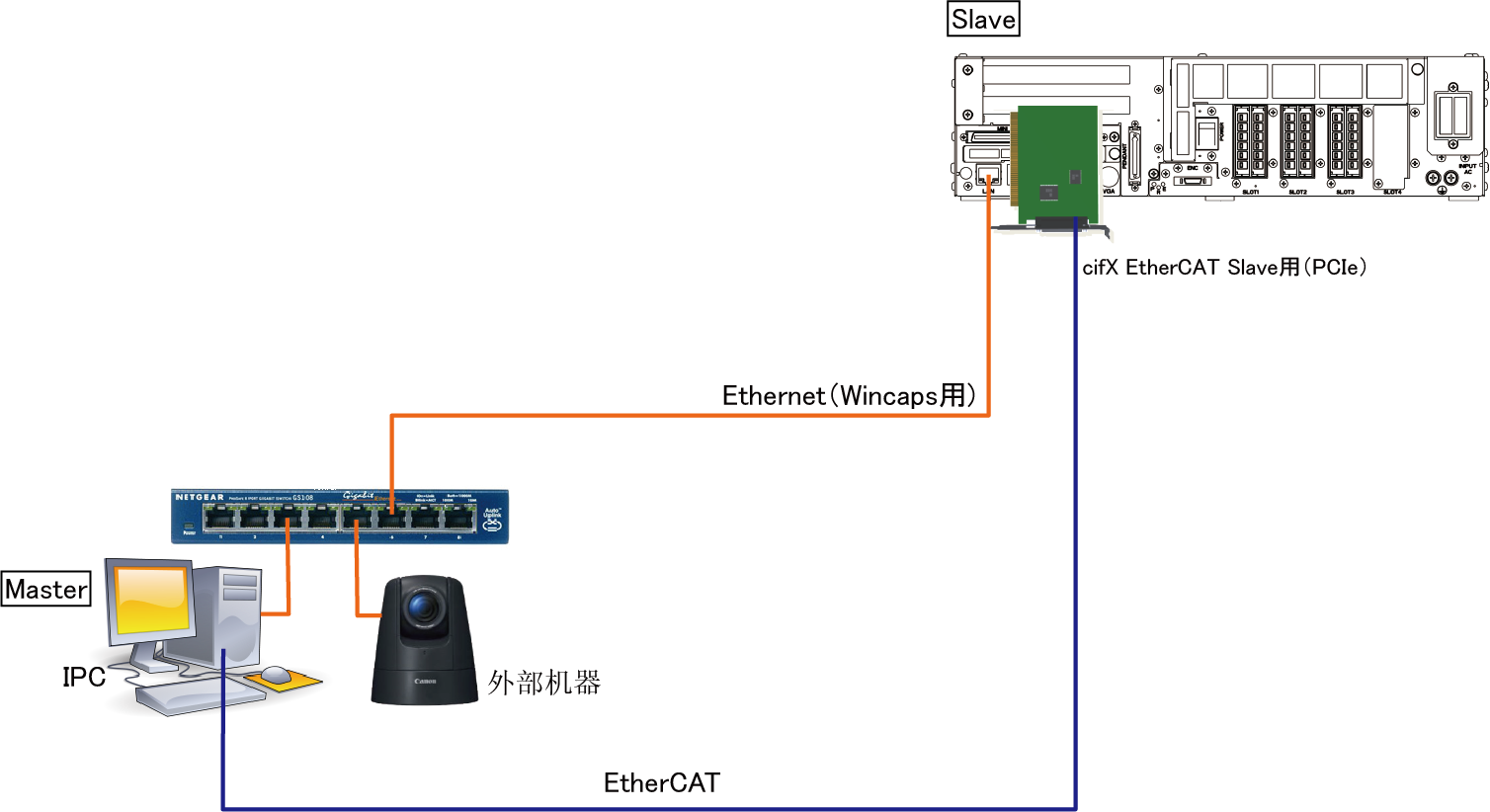
机器人的轨道生成由用户通过配备EtherCAT Master的IPC进行,如果使用EtherCAT通信,该功能向作为Slave的RC8系列控制器发送信号,RC8系列控制器将遵照该位置指令值,使机器人动作。
此功能对Ver.2.2.*及更高版本有效。
为了进行EtherCAT通信,需要在RC8系列控制器的PCIe插槽上增设EtherCAT子局板。另外,为了使功能有效,也需要“EtherCAT Slave Motion”许可证(有偿)。
详细内容
关于详细内容,请参照“EtherCAT Slave Motion使用说明书”。
ID : 3056