
ID : 3369
Homing(原点复位)功能
Homing功能是通过指定的原点复位方法、动作速度等进行原点复位的功能。
当外部轴的编码器为增量型时,切断电源会使绝对位置信息丢失。为此,执行开始时的动作时,需要使用该功能执行原点复位,初始化位置信息。
Homing功能使用指令执行。另外,也可通过多功能教导器执行。
- 当外部轴的编码器是绝对型时,不必使用此功能。
- Ver.2.7.*及更高版本可使用该功能。
事前准备
为了使用Homing功能,需要事前为成为外部轴的伺服放大器设定参数。
使用各放大器厂家提供的设定工具,为决定原点复位动作的参数设定下述的值。
| Index | Sub-Index | Name |
|---|---|---|
| 0x607C | 0x00 | Homing offset |
| 0x6098 | 0x00 | Homing method |
| 0x6099 | - | Homing speeds |
| 0x00 | Number of entries | |
| 0x01 | Speed during search for switch | |
| 0x02 | Speed during search for zero | |
| 0x609A | 0x00 | Homing acceleration |
使用了指令的原点复位
原点复位可使用SetHoming指令,通过自动模式、教导检查模式执行。
有关指令的规格,请参照编程手册的“SetHoming”。
执行指令前,请断开电机。在电机ON的状态,显示错误。
执行指令前,请进行TakeArm,获取控制权。
另外,为了通过教导检查模式执行,需要提前断开双重安全SW联动功能的“电机电源ON联动”。设定步骤请参照“双重安全SW联动功能的设定”。
如果执行SetHoming,电机接通,原点复位动作开始,动作完成后电机断开。
- 不能在锁机中执行,不能执行原点复位中的机器人轴的动作。
- 不能进行机器人轴、内部附加轴的原点复位动作。
实施例子
下述例子是使用了SetHoming的原点复位的实施例子。
例1:进行Robot0的7轴的原点复位。如果过了10s后原点复位不结束,出错。
Robot0.SetHoming 7, 10000例2:同时进行Robot0的7、8轴的原点复位。如果过了5s后原点复位不结束,出错。
Robot0.SetHoming (7, 8), 5000指令执行时的注意事项
以下情形停止原点复位动作。
- 经过了超时时间时
- 在伺服放大器内部发生了错误时
- 在机器人控制器上发生了错误时
使用了多功能教导器的原点复位
以用户级别“维护”进行操作。
1
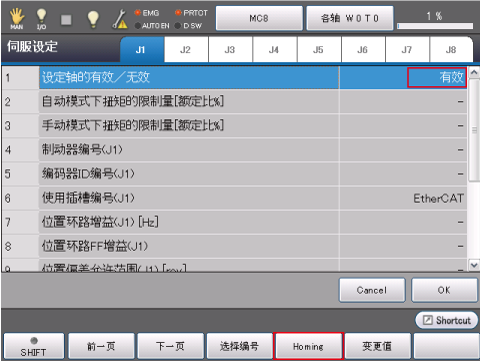
操作路径:按[F2 机械臂]-[F12 保养]-[F10 轴设定]-[F5 伺服设定]。
在伺服设定画面上请确认轴有效无效设定为有效。不是有效时,请参照“附加轴的有效化设定”,进行设定。
按功能键上显示的[F4 Homing]按钮。
2
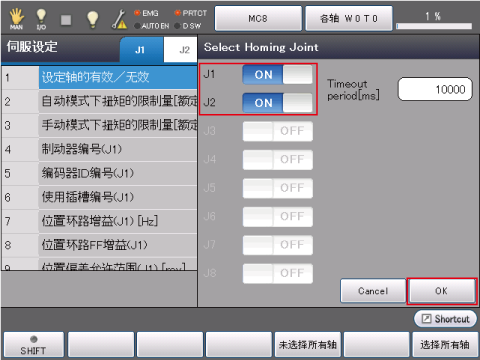
在原点复位轴选择画面上,选择进行原点复位的轴,按[OK]按钮。
3
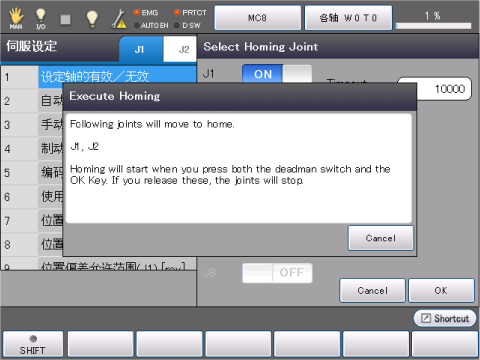
显示确认用系统信息。
在接通双重安全开关的状态,按[OK]键。在按住期间执行原点复位动作,动作中在画面上显示进展状况。
4
原点复位完成后,显示系统信息。
在动作中放开按钮时动作中断,显示错误画面。发生了错误时,请从Step1再次进行操作。
ID : 3369