
ID : 3324
HSR / HSA1的组合
在此对系统构成的内容,分下述项目做了说明。
系统构成图
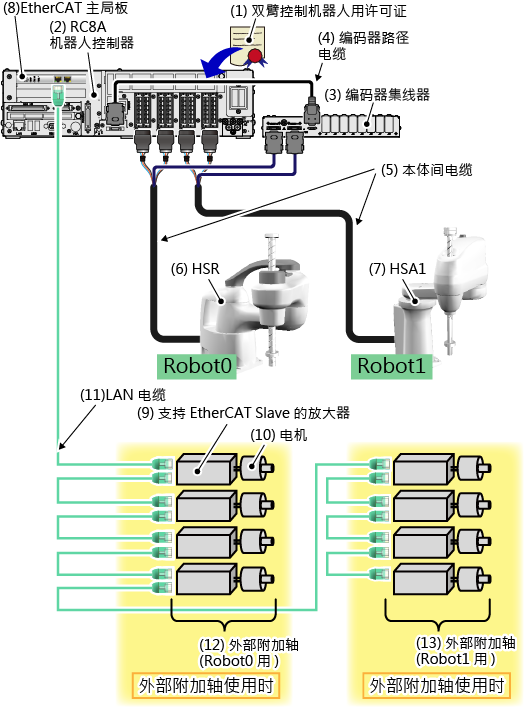
整体的系统构成如下图所示。
(下图是控制HSR和HSA1的示例。)
RC8系列用机器人相关构件的说明
| 构件 /(构件号) |
内容 |
|---|---|
(1) 双机械臂控制用许可证 |
详细内容请参照“许可证”。 |
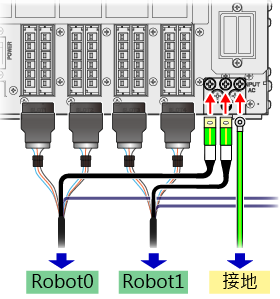
(2) RC8A机器人控制器 |
这是控制HSR及HSA1的2台机器人的控制器。 带有机器人用的3个接地端子。请如下图所示连接。
外形及规格等详细内容参照“RC8系列机器人控制器说明书”。 |
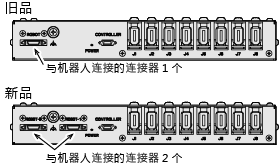
(3) 编码器集线器(4) 编码器路径电缆编码器集线器和编码器路径电缆是套件。 此外,该套件有旧件和新件。
编码器路径电缆的长度,旧件、新件都是约 0.4 m 。 |
编码器集线器这是汇集各机器人的编码器信号,发送至RC8A机器人控制器的设备。 上述系统中只能使用新件。
有关外形尺寸及设置上的注意,请参照“编码器集线器”。 编码器路径电缆这是连接编码器集线器和RC8A机器人控制器的电缆。 不能在新件的编码器集线器上使用旧件的编码器路径电缆。请务必在新件的编码器集线器上使用新件的编码器路径电缆。 |
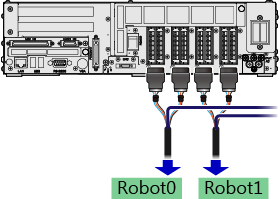
(5) 本体之间电缆 |
编码器线通过编码器集线器与RC8A机器人控制器连接。 |
(6) HSR |
这是作为机器人0进行动作的机器人。 外形及规格等详细内容参照“HSR机器人使用说明书”。 也可以使用HSA1作为机器人0。 从RC8A机器人控制器的正面来看,从左边的电机连接器上连接的机器人起,依次为机器人0、机器人1。
|
(7) HSA1 |
这是作为机器人1进行动作的机器人。 外形及规格等详细内容参照“HSA1机器人使用说明书”。 也可以使用HSR作为机器人1。 |
外部轴相关构件的说明
使用外部附加轴时,请参考以下内容。
| 构件 | 内容 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
(8) EtherCAT 主局板 |
这是与外部轴进行EtherCAT通信用的板。 使用需要软件许可证。 根据软件许可证和板的组合方式,准备了以下产品。
|
||||||||||
(9) 支持EtherCAT Slave 放大器 |
已预先确定了可使用的放大器。请参照“外部附加轴(EtherCAT)使用说明书”的“硬件连接构成”中的“支持EtherCAT Slave放大器”。 |
||||||||||
(10) 电机 |
这是外部轴的电机。请使用靠支持EtherCAT Slave 放大器动作的电机。 | ||||||||||
(11) LAN电缆 |
这是EtherCAT通信用的电缆。 请使用范畴为5以上的双绞线。 直连和交叉中的任意一种接线方式均可使用。
|
||||||||||
(12) 外部附加轴 (Robot0用) |
使用附加轴时,如上图所示连接即可使用。 可使用的轴数是1台机器人0轴~4轴。 将轴用于Robot0和Robot1的哪一个与支持EtherCAT Slave 放大器的连接顺序有关。 从EtherCAT 主局板上最初连接的支持EtherCAT Slave 的放大器开始依次分配为Robot0的5轴、Robot0的6轴。 有关详细内容,请参照“将外部轴分配至各机器人”。 |
||||||||||
(13) 外部附加轴(Robot1用) |
注意事项
-
实际连接各设备时,请阅读以下参考内容并安全实施。
RC8系列用机器人的连接 外部轴的连接 ”外部附加轴(EtherCAT)使用说明书”的”硬件连接构成” -
进行系统的设计及操作时,请阅读以下参考内容并安全实施。
关于RC8系列用机器人 关于外部轴 ”外部附加轴(EtherCAT)使用说明书”
ID : 3324