
ID : 2788
补偿工具的值
1
选择工具编号,按[下一步]。
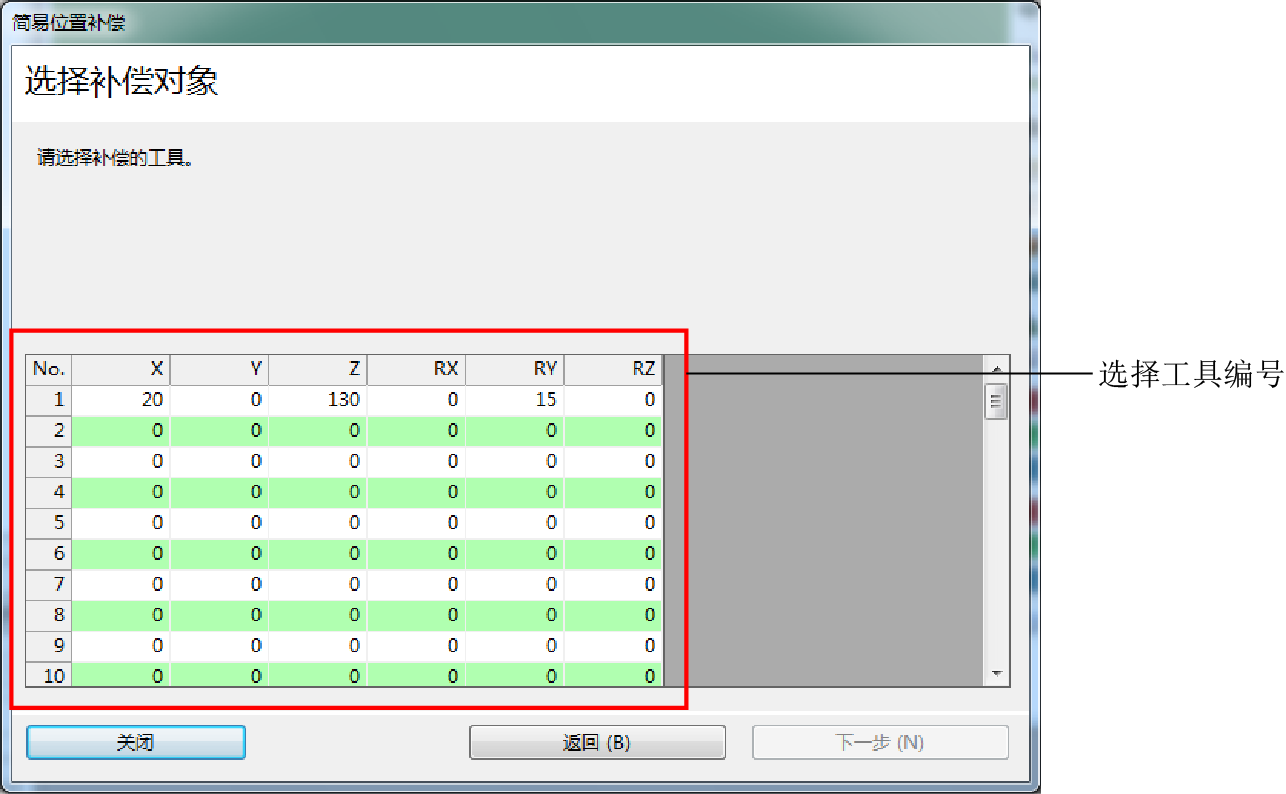
2
显示“在实施补偿之前,为当前的值建立备份。”,按[OK],选择的当前的工具坐标数据被备份。
3
选择预先登录的位置数据,示教相同位置,通过[取得]登录。
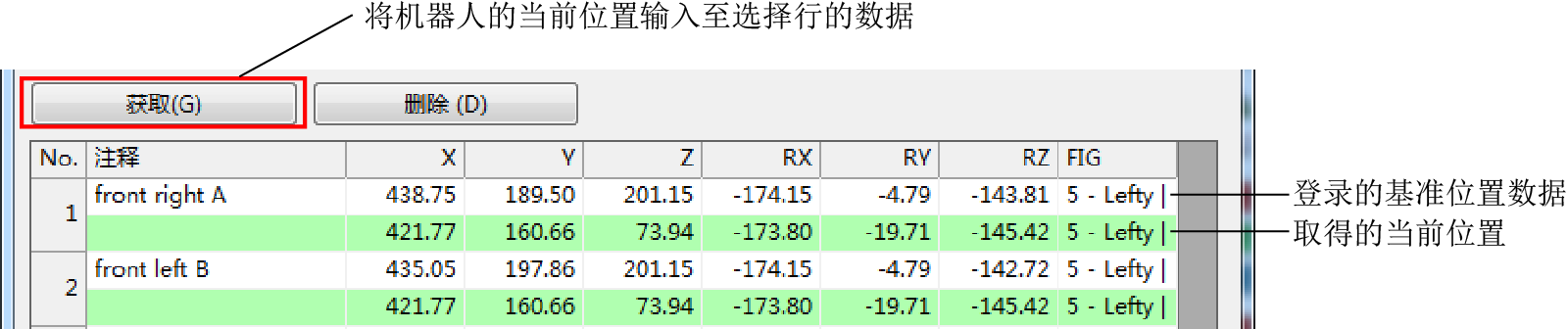
取得时请正确示教位置(X,Y,Z)。与姿势(Rx,Ry,Rz)无关。
取得当前位置时,请确认在“基准位置的登录”中阐述的准备是否已完成。
取得所有点的当前值后,按[下一步]。
当工具前端靠近法兰盘的转轴的延长线时,有时值偏差大。
4
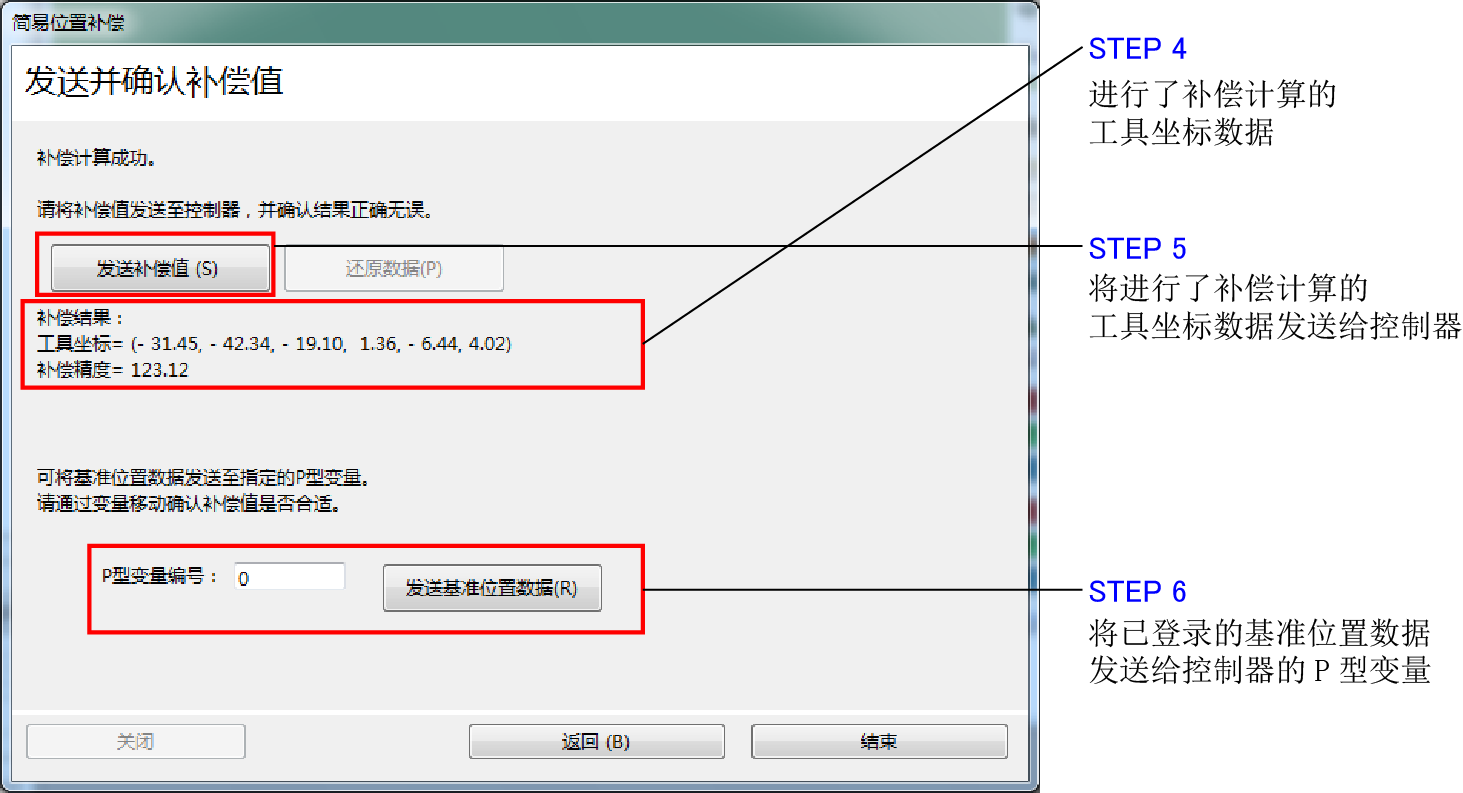
确认进行了补偿计算的工具坐标数据。
补偿精度是表示教导精度的值。就是计算得到的工具坐标中已登录的基准位置数据的错位量的最大值。单位为mm。如果登录多个基准位置,呈现增大的趋势。
5
将进行了补偿计算的工具坐标数据发给控制器。
6
将已登录的基准位置数据发送给控制器的P型变量。
7
通过多功能教导器使机器人移到P型变量(基准位置),确认是否已被恰当地补偿,按[完成]。
补偿未被正确执行时,恢复数据,重新示教基准位置。
ID : 2788