
ID : 2504
简单设定(WINCAPSIII)
可根据实际的使用环境简单地进行各种设定,在最佳状态下使用机器人。使用该功能,可简单地进行该设定。(Ver.2.0.*以后)
- 该功能只能在VS-A3、VS-A4、VS-S2、HSR、HSA1各机器人上使用。
- 多功能教导器的操作步骤请参照“简单设定(多功能教导器)”。
设定项目
- 地面安装、悬挂设定(*1)
- 前端负载质量[g]
- 负载重心位置X[mm]
- 负载重心位置Y[mm]
- 负载重心位置Z[mm]
- 负载重心惯量Ix[kgcm^2]
- 负载重心惯量Iy[kgcm^2]
- 负载重心惯量Iz[kgcm^2]
- 最佳速度控制设定
- HighPathAccuracy setting
- 重力补偿有效无效设定(*1)
- 设定挠度修正功能有效(*1)
*1:仅VS
操作步骤
这里以VS-A4机器人为例来说明步骤。
1
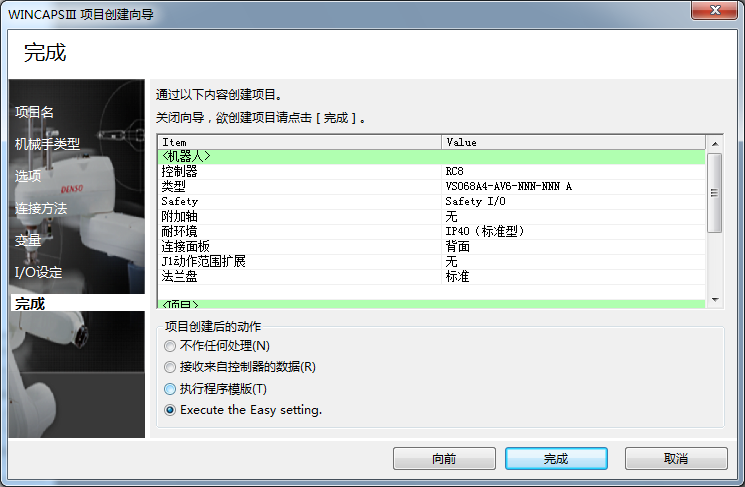
创建新项目。
将步骤最后的“项目创建后的操作”勾选成“执行简单设定”,按压[完成]。
2
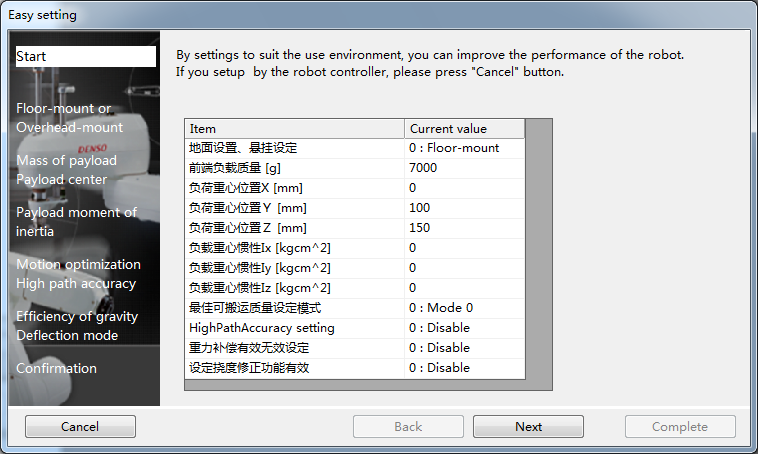
显示简单设定画面。
可以在该画面确认设定的项目和当前设定的值。确认后,按压[下一步]。
通过多功能教导器进行简单设定时,按压[中止]。
在各项目的设定画面按压[返回]后,返回前一项目的设定画面。
3
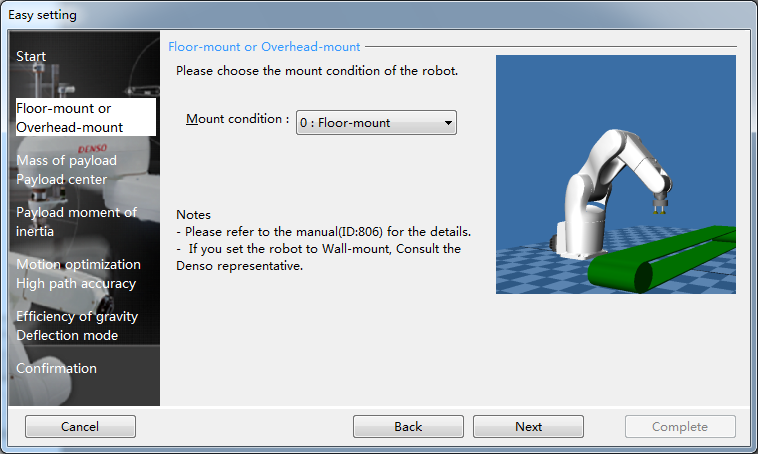
进行“地面设置、悬挂设定”。
选择列表后,显示选项。选择[0:地面设置]或者[1:悬挂],按压[OK]。
详细内容请参照“机器人的安装条件设定”。
完成后,按压[下一步]。
4
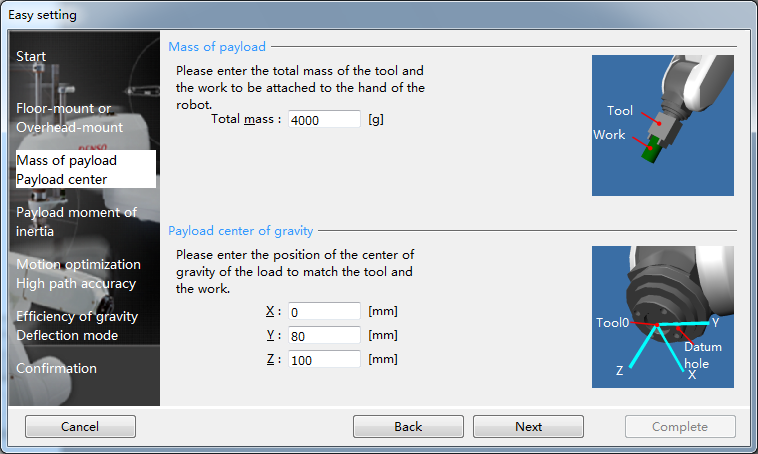
设定“前端负载质量”和“负载重心位置”。
- 前端负载质量
选择输入栏,输入值。(0~7000) - 负载重心位置
选择输入栏,输入各重心位置的值。(-10000~1000)
完成后,按压[下一步]。
5
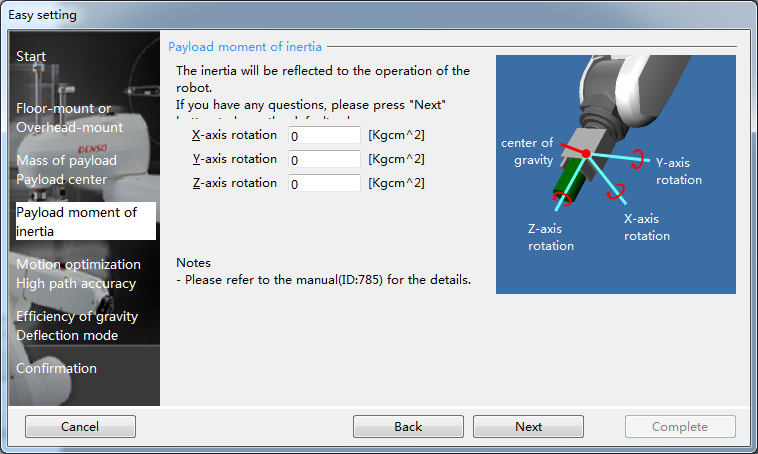
设定“负载重心惯量”。
选择输入栏,输入各轴旋转的值。(0~100000)
详细内容请参照“关于前端负荷惯量的计算”。
完成后,按压[下一步]。
6
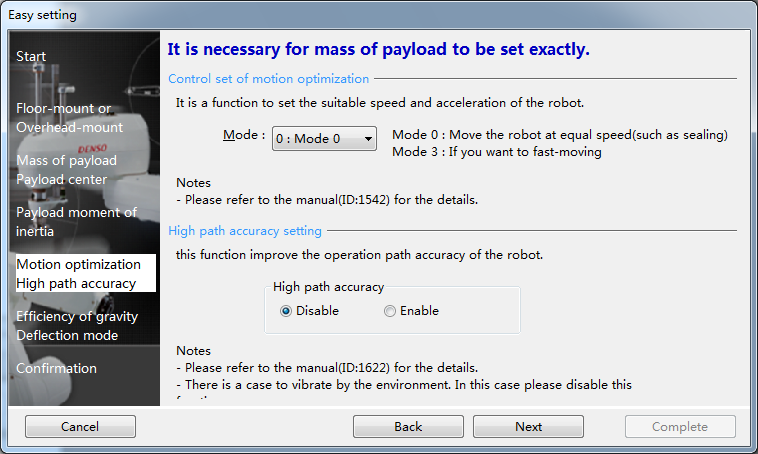
设定“最佳可搬运质量”和“高轨迹控制”。
完成后,按压[下一步]。
7
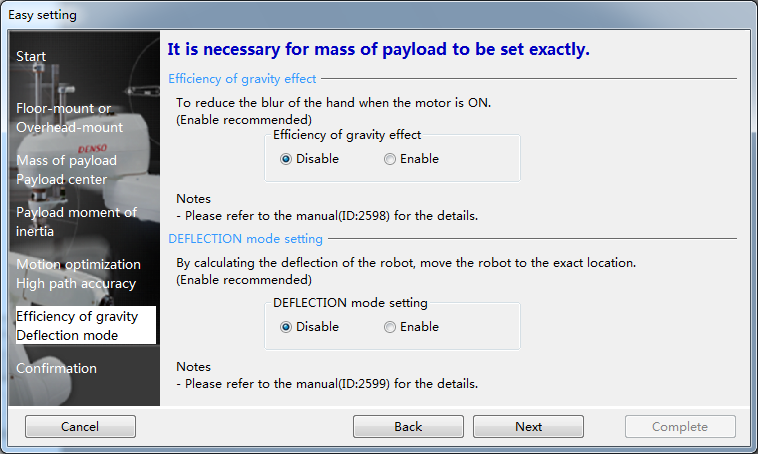
设定“重力补偿有效无效设定”和“设定挠度修正功能有效”。
完成后,按压[下一步]。
8
确认设定的内容,按压[完成]。将之前设定的各项目值保存到项目。
至此操作结束。
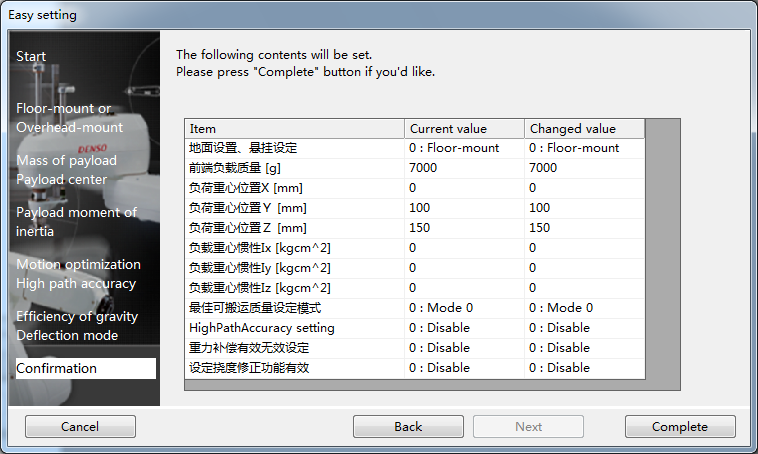
项目发送时,将设定的内容发送向控制器。
简单设定的中止
在各项目的设定按压[中止]后,可在中途中止简单设定。按压[OK]后中止。中止后,就不会保存之前设定的各项目值。
在中止画面,可以选择在下次启动时显示或不显示简单设定。
设定内容的变更
如果希望变更设定的内容,从菜单“项目”的“简单设定”执行。
ID : 2504