
ID : 785
关于前端负荷惯量的计算
关于前端负荷惯量的计算(惯性力矩)的示例。
夹治具的设计中使用CAD等时,请使用CAD求值。
前端负载为机器人法兰上夹治具等的终端受动器与工件的总负载。
计算前端负荷惯量时需满足以下几点。
- 不可添加超过机器人本体规格的“最大允许惯量”的前端负载。
- 将前段负载条件输入至项目内的使用条件参数后“重力补偿控制功能(GrvCtrl)”和“最佳速度控制功能(SpeedMode)可更恰当地进行动作。
机器人本体规格中“最大容许惯量”的单位为“kgm²”。
使用条件参数中前端负载惯量的单位为“kgcm²”。
符合条件即可计算。
惯量(惯性力矩)的计算公式
各种形状(圆柱1、圆柱2、长方体、球、重心位置不在旋转轴上时、)的基本惯量的计算公式。
- l: 惯量(旋转力矩)
- m: 质量
- r: 半径
- a,b,c,L: 长度
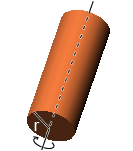
圆柱1(围绕圆的中心轴旋转)
以圆的中心轴为旋转中心。
计算公式l = 1/2 * m * r^2
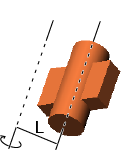
圆柱2(围绕与圆的中心轴垂直相交的轴旋转)
旋转轴通过重心。
计算公式l = 1/4 * m * ( r^2 + 1/3 * L^2)

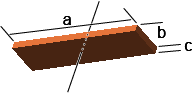
长方体
旋转轴通过重心。
计算公式l = 1/12 * m * ( a^2 + b^2 )
球
旋转轴通过重心。
计算公式l = 2/5 * m * r^2

重心位置不在旋转轴上时
lg:重心的转动惯量
计算公式l = lg + m * L^2
J4、J5、J6转动惯量的计算示例
以下述终端受动器为例。
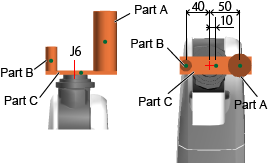
- PartA
- 半径(ra):20、长度(la):100、质量(ma):1.0、重心距旋转轴的距离(La)
- PartB
- 半径(ra):10、长度(lb):40、质量(mb):0.1、重心距旋转轴的距离(Lb)
- PartC
- 长度(hc):120、宽度(wc):15、厚度(tc):10、质量(mc):0.14、重心距旋转轴的距离(Lc)
J6的转动惯量(Ij6)
PartA的J6转动惯量为
Ia6 = 1/2 * ma * ra^2 + ma * La^2
PartB的J6转动惯量为
Ib6 = 1/2 * mb * rb^2 + mb * Lb^2
PartC的J6转动惯量为
Ic6 = 1/12 * mc * (hc^2 + wc^2) + mc * Lc^2
所有夹治具的J6转动惯量为
Ij6 = Ia6 + Ib6 + Ic6
J5的转动惯量(Ij5)
请参考机器人的图纸计算重心距离各零部件旋转轴的距离。J5、J4的转动惯量根据对应轴下方的轴位置不同,重心距离也不同。在最大距离处计算。
PartA的J5转动惯量为与圆柱中心轴相交差旋转轴的惯量。
Ia5 = 1/4 * ma * (ra^2 + 1/3 * la^2) + ma * La^2
PartB的J5转动惯量为与圆柱中心轴相交差旋转轴的惯量。
Ib5 = 1/4 * mb * (rb^2 + 1/3 * lb^2) + mb * Lb^2
PartC的J5转动惯量为
Ic5 = 1/12 * mc * (wc^2 + tc^2) + mc * Lc^2
所有夹治具的J5转动惯量为
Ij5 = Ia5 + Ib5 + Ic5
J4的转动惯量(Ij4)
J4的计算与J5相同。
ID : 785