
ID : 2486
监视对象与限制领域的模型概要
监视对象与限制领域
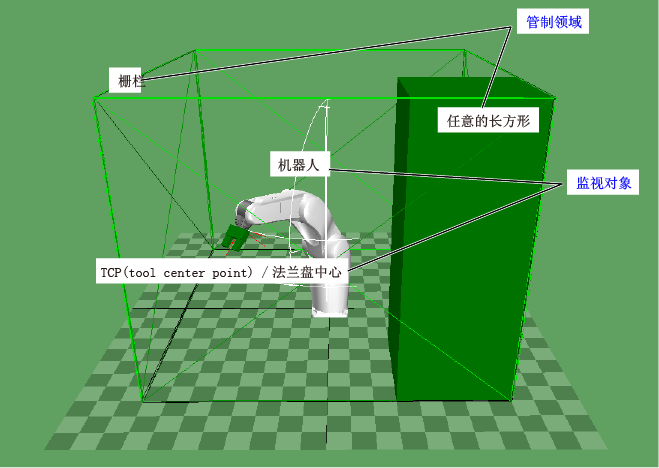
监视对象与限制领域如下所示。
| 分类 | 模型名 | 详细 | |
|---|---|---|---|
| 监视对象 | 机器人模型 | 监视机器人的速度和外形。 速度的监视点按每个机器人决定。详细内容请参照“Robot Speed Monitoring (RSM)”中的机器人手臂上的点。 |
|
| 工具模型 | 监视工具的速度和外形。 速度的监视点是TCP和法兰盘中心。 如果想监视,防止工具与其他机器接触,请使工具模型与实际的工具外形一样或使之更大。 |
||
| 管制领域 | 常时 | 栅栏模型 | 始终监视监视对象是否在领域内。需要围住机器人。 |
| 暂时 | 任意的长方形模型 | 监视与监视对象的接触。 如果想监视,防止监视对象接触某些周边设备,请使任意的长方形模型与对象周边设备的外形一样或使之更大。 可以通过“监视领域*无效输入”的指定切换监视或不监视。 |
|
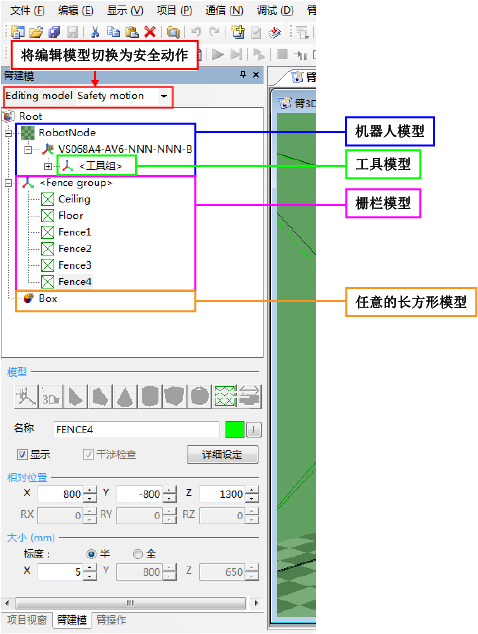
模型化的方法
可以使用WINCAPSIII的臂建模功能创建模型。
模型创建时的制约
请在指定的层级创建各模型。
| 模型名 | 制约 |
|---|---|
| 机器人模型 | Robot Node以下的对象。(工具组除外) |
| 工具模型 | 工具组以下的对象。 |
| 栅栏模型 | Root正下方的对象 |
| 任意的长方形模型 | Root正下方的对象 |
ID : 2486