
ID : 2266
基础定义的显示、设定
设定从世界坐标原点观察到的机器人基础位置。
世界坐标是以用户指定的原点为基准的坐标系,可在通用坐标系中指定多台机器人的位置。
通过将世界坐标的原点作为设备原点,可指定各机器人在设备坐标中的位置。
使用该功能时,需要将用户参数190号“启动时BASE编号”设定为1。
操作路径:基本画面 - [F2 机械臂]-[F6 辅助功能]-[F10 基础]
显示[基础设定]视窗。
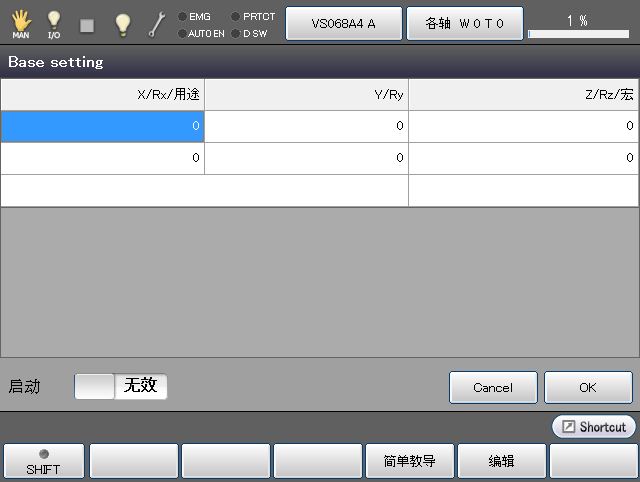
| 可使用的功能键 | |
|---|---|
| [F4 简单教导] | 通过用机器人示教3个点,设定基础定义。 |
| [F5 编辑] | 选择想变更的坐标要素,按[编辑],显示数字键。 使用数字键输入值,按压数字键上的[OK]变更值。 通过按[基础设定]视窗的[OK],确定变更后的值。 |
| 启动时[有效/无效] | 指定启动时将基础设定设为“有效”还是“无效”。 启动时“有效”在重启前不会变为有效。 |
示教后设定和变更基础定义时,用ConvertPosBase修订示教点。详细情况请参照ConvertPosBase的“用例”。
ID : 2266
- 本页相关信息
- 通过简单教导进行基础定义