
ID : 2260
WINCAPSIII中的排除区域设定
利用WINCAPSIII的臂建模功能创建排除区域,输出数据。
需要用主局控制器以及各子局控制器进行。
登录等级为程序员。
排除区域的创建步骤
1
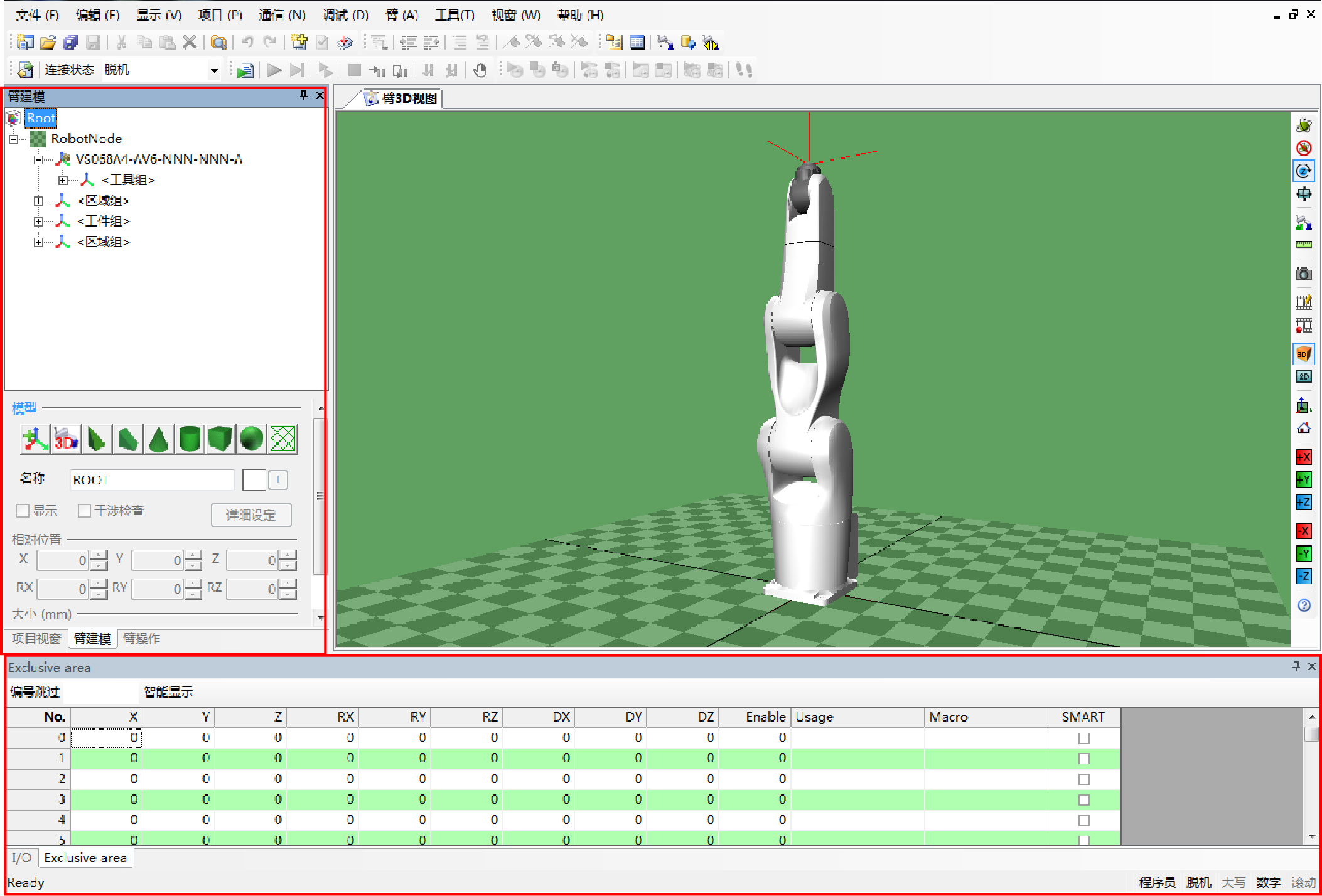
打开WINCAPSIII的臂建模视窗,创建区域。
首次使用该功能时,打开排除区域视窗。
操作路径:菜单[显示(V)] - [机械臂坐标系] - [排除区域]
在“排除区域”视窗的节点设定排他模型的位置、大小。
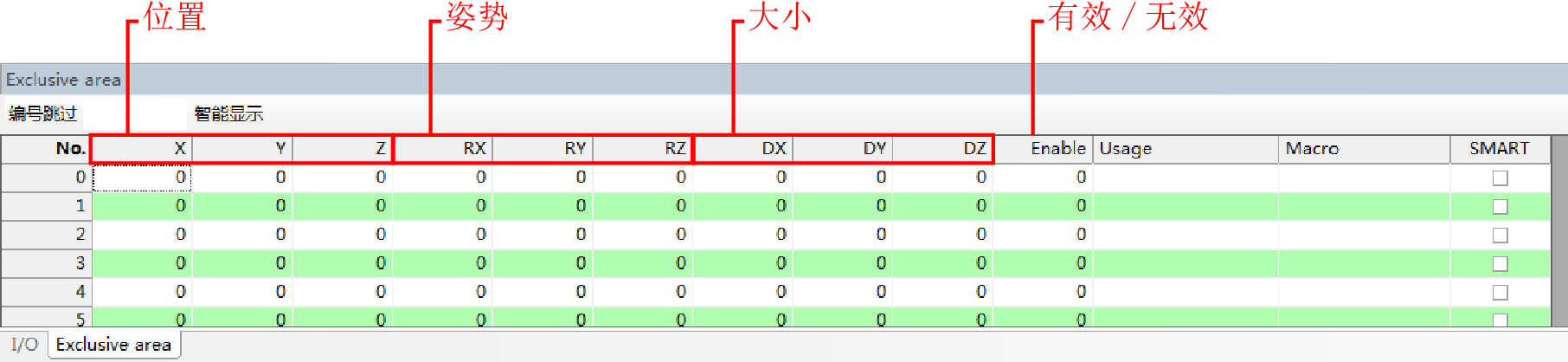
| 项目 | 内容 |
|---|---|
| No. | 区域编号 |
| X | 位置X |
| Y | 位置Y |
| Z | 位置Z |
RX |
姿势X |
| RY | 姿势Y |
| RZ | 姿势Z |
| DX | 大小X |
| DY | 大小Y |
| DZ | 大小Z |
| Enable | 1:有效 0:无效 |
2
如果在臂建模视窗勾选排除区域的“显示”,显示区域。
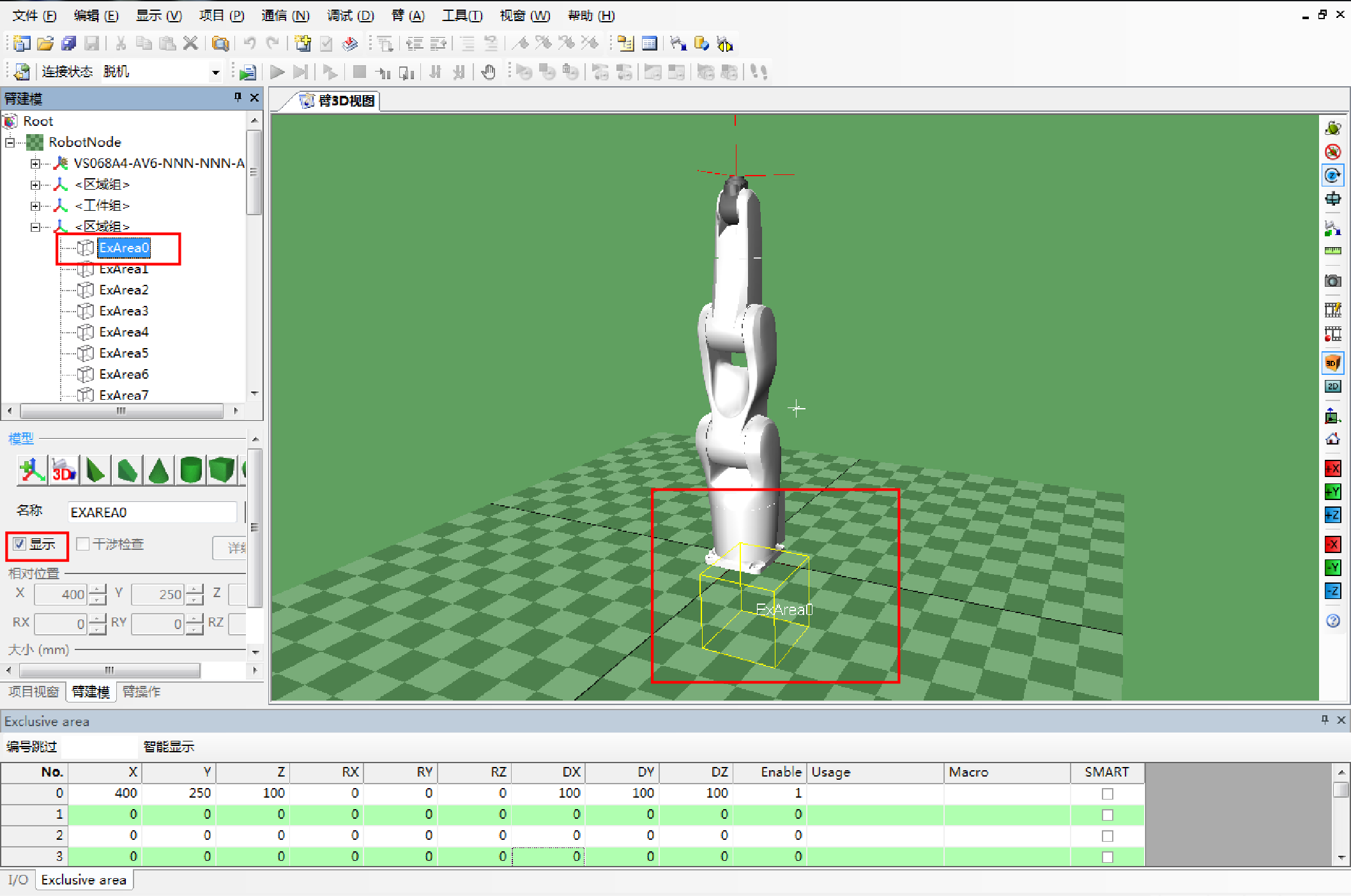
3
创建多个排除区域时,重复进行STEP1到STEP2。
4
输出排除区域的数据。
选择菜单[机械臂(A)]的[虚拟栅栏/排他控制数据输出(V)]。
处理完成后,显示完成信息,因此按[OK]按钮。
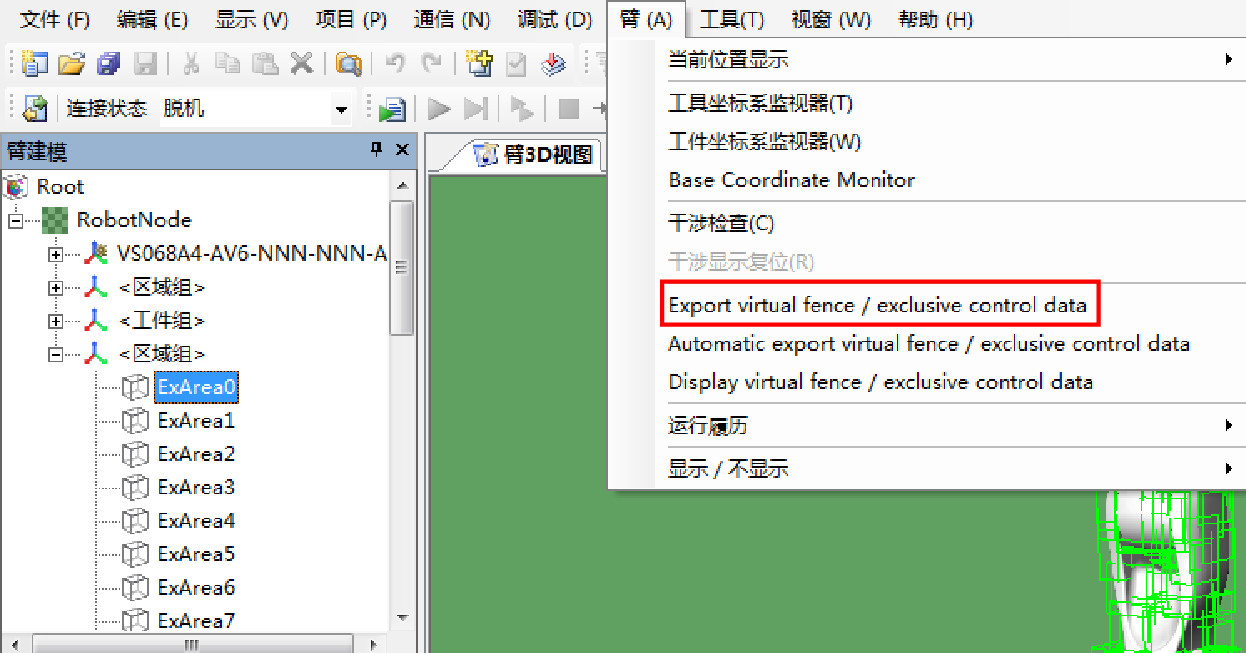
想确认输出的排他控制数据时,可通过菜单[机械臂(A)]的[虚拟栅栏/排他控制数据显示(D)]确认。
5
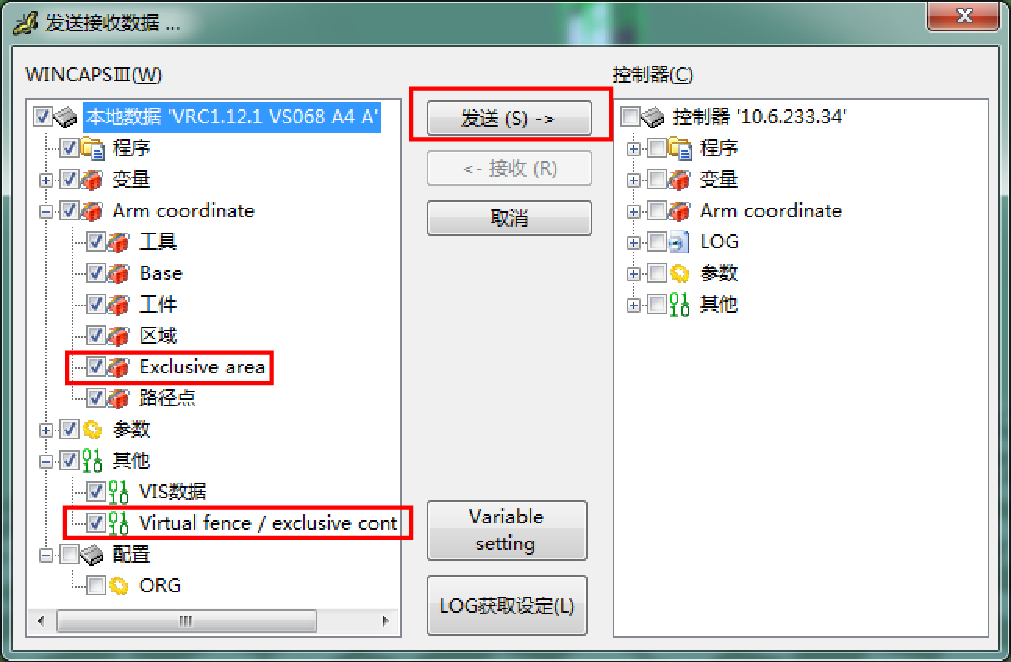
发送给控制器。
请确认已勾选“排除区域”以及“虚拟栅栏/排他控制数据”,然后发送。
请参照WINCAPSIII指南中的“通信设定”及“发送接收数据”。
发送数据后,请重新启动控制器。
执行该作业时,需要控制器和WINCAPSIII可进行通信。通信设定方法请参照WINCAPSIII指南中的“与机器人控制器的通信”。
也可用USB存储器传递数据。详细内容请参照“通过USB传输数据”。
6
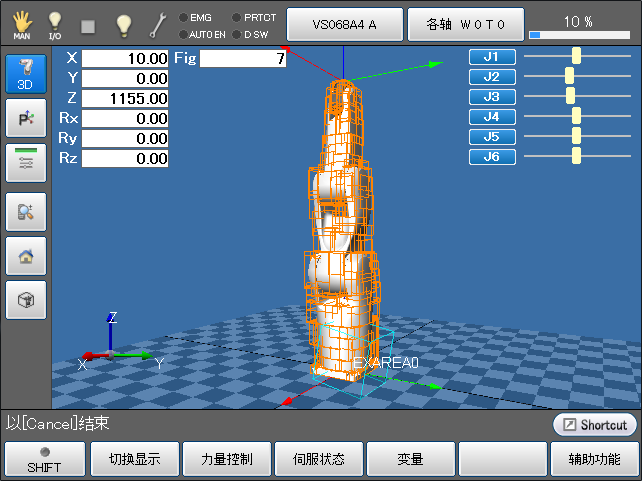
用多功能教导器打开机械臂画面。
要显示排他控制数据,请将想显示的排他控制数据的显示设定与参数的“329:排他控制控制器设定”设为“1:主局”或者“2:子局”,重启控制器。
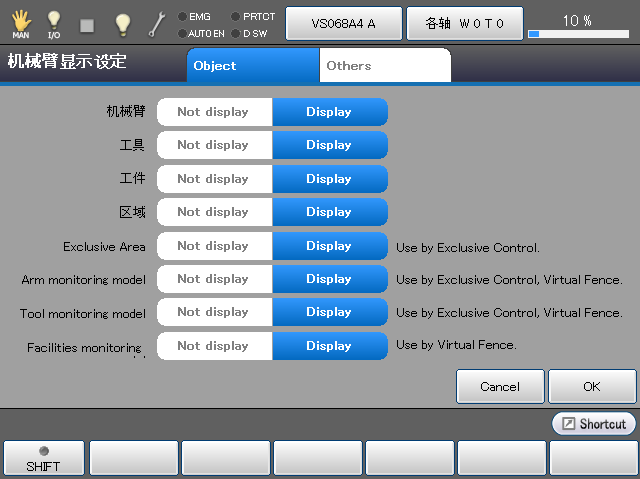
排他控制数据的显示/不显示
可设定排除区域、监视模型的显示、不显示。
操作路径:基本画面 - [F2 机械臂]-[F6 辅助功能]-[F7 显示设定]
设定各项目的“不显示/显示”后,按[OK]。
ID : 2260