
ID : 2261
排他通信设定和排他监视设定
用各控制器设定主局/子局。
排他通信设定
操作路径:基本画面 - [F2 机械臂]-[F6 辅助功能]-[F11 排他控制]
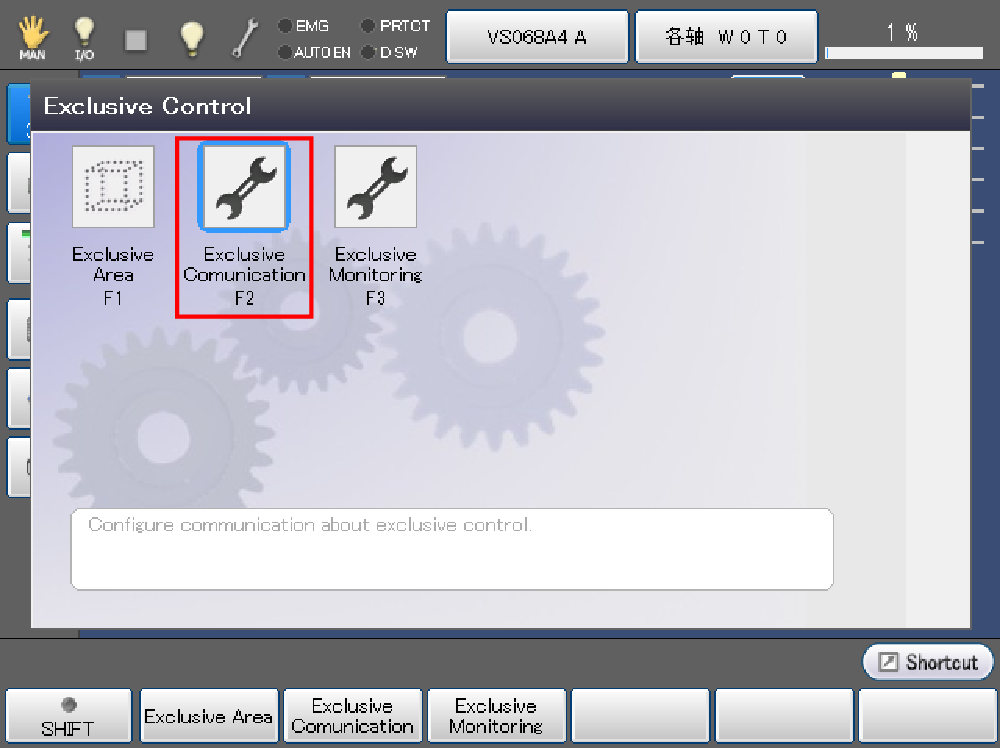
按[F2 排他通信设定],打开画面。
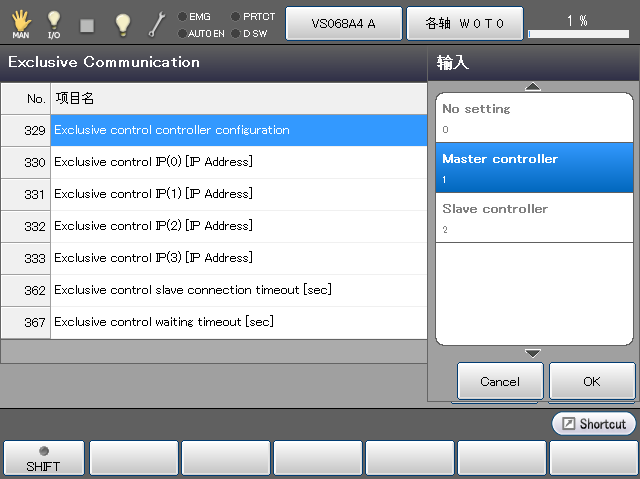
用主局/子局控制器进行的设定
如果选择“排他控制控制器设定”,按[F5编辑],可选择主局/子局。
主局控制器选择“1”,子局控制器选择“2”,按[OK]。
| 编号 | 项目名 | 单位 | 初始值 | 内容 |
|---|---|---|---|---|
| 329 | 排他控制控制器设定 | - | 0 |
将使用的控制器设为主局控制器或者子局控制器。 0:无排他 1:主局 2:子局 |
主局控制器的设定
设定主局控制器时,进而进行通信设定。
操作路径:基本画面 - [F2 机械臂]-[F6 辅助功能]-[F11 排他控制] - [F2 排他通信设定]
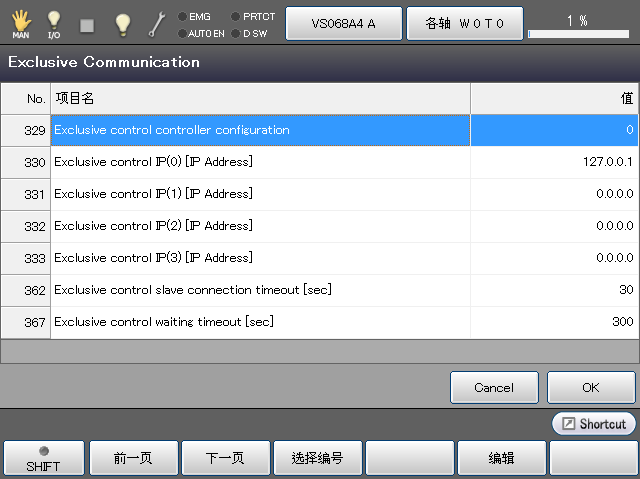
使用[F5 编辑]按钮打开数字键,输入作为排他控制功能对象的控制器的IP地址,按[OK]。
如果为IP地址输入“0.0.0.0”,可从排他组剔除。
参数一览
| 编号 | 项目名 | 单位 | 初始值 | 内容 |
|---|---|---|---|---|
| 330 | 排他控制IP(0)[IP Address] | - | 127.0.0.1 | 设定主局控制器的IP地址。 将主局控制器放进排他组时,请直接使用初始值。从排他组剔除时,请输入“0.0.0.0”。 |
| 331 | 排他控制IP(1)[IP Address] | - | 0.0.0.0 | 设定子局控制器的IP地址。 |
| 332 | 排他控制IP(2)[IP Address] | - | 0.0.0.0 | 设定子局控制器的IP地址。 |
| 333 | 排他控制IP(3)[IP Address] | - | 0.0.0.0 | 设定子局控制器的IP地址。 |
| 362 | 排他控制控制器启动等待时间[sec] | sec | 30 |
设定主局控制器等待子局控制器启动完成的时间。 |
| 367 | 排他控制待机超时时间[sec] | sec | 300 | 设定排他控制中机器人等待时间的上限值。如果等待时间超过该值,发生错误“0x83201567:排他控制待机超时”。 |
排他监视设定
根据需要用主局/子局控制器进行设定。
要执行该操作,请将用户等级指定为“维护”。
操作路径:基本画面 - [F2 机械臂]-[F6 辅助功能]-[F11 排他控制] - [F3 排他监视设定]
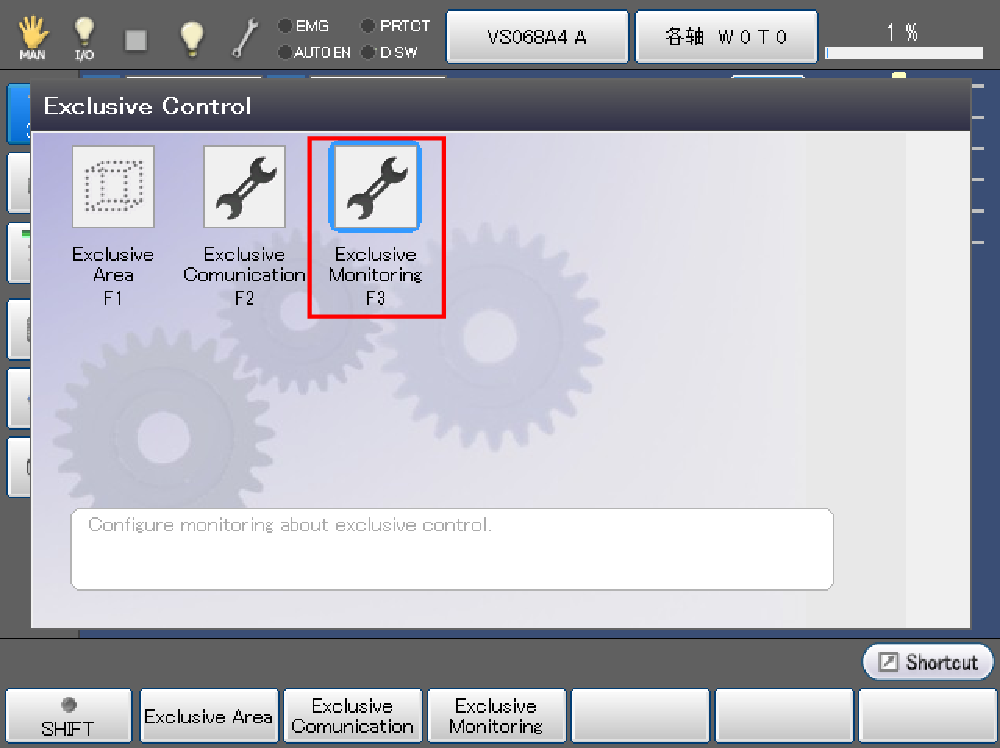
按[F3 排他监视设定],打开画面。
使用[F5 编辑]按钮打开数字键,输入监视周期,按[OK]。
| 编号 | 项目名 | 单位 | 初始值 | 内容 |
|---|---|---|---|---|
| 363 | 排他控制监视周期 | ms | 8 | 设定监视周期。 |
发生监视周期超时时,首先请减少监视模型。如果没有效果,请将参数“363:排他控制监视周期”延长为8ms以上。
ID : 2261