
ID : 1769
I/O参数的显示、变更
操作路径:[F4 I/O]-[F6 辅助功能]-[F5 I/O参数]
显示、变更I/O参数的设定值。
如果按压[F5 I/O参数],则显示以下[I/O参数]视窗。
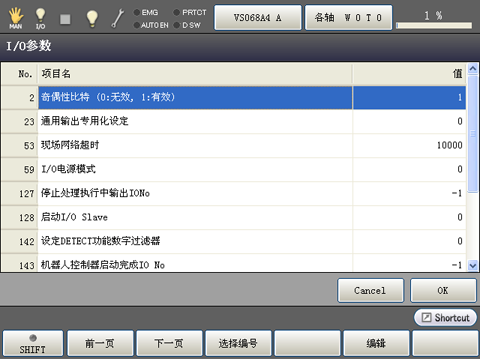
| 各项目详细内容 | |
|---|---|
| [奇偶校验位] | 进行I/O指令领域的奇偶校验有效/无效的设定。 |
| [通用输出专用化设定] | 使用连续开始许可信号时设定为“1”。 |
| [现场网络超时] | 设定现场网络的超时时间。 |
| [I/O电源模式] | 切换Mini I/O・Hand I/O・Motion I/O电源的内部、外部。 |
| [停止处理执行中输出IONo] |
使用紧急停止和STOP按钮等对全部程序执行停止时,一定时间内(停止处理执行中)无法执行下一次启动。 |
|
[启动Command-Slave]
(Ver.2.5.*或更高版本) |
使用Command-Slave功能时,追加Command-Slave许可证并设定为“2”。 |
| [设定DETECT功能数字过滤器] | DETECT功能时,自动执行进行I/O高速检测的高速数字过滤器。设定为“1:标准”时,使用通常的I/O速度进行检测。通常该功能在“0:高速”状态下使用。 |
| [机器人控制器启动完成IONo] |
指定控制器启动完成时为ON的I/O编号。 |
| [MiniI/O 全通用] |
MiniI/O专用分配模式中,无需MiniI/O的专用输出入,全部通用使用时进行设定。 |
| 无TP时,外部模式输出的允许联动 (Ver.1.9.*或更高版本) |
无教导器时,外部模式输出与自动允许的ON、OFF联动进行ON、OFF。。 |
| [机器人动作中输出IONo(指令值)] |
指定控制器发出“机器人动作指令”时为ON的I/O编号。 |
| [机器人动作中输出IONo(编码器值)] |
指定编码器返回的信号显示“机器人动作中”时(即实际的机器人动作中时)为ON的I/O编号。 |
| [IO字节序转换] | 转换DefIO所定义数据的大端和小端。 |
| [电池更换时期输出IONo] | 指定超过编码器电池检查日期时处于ON状态的I/O编号。 请将指定的I/O编号设定为通用输出。不输出时指定为“-1”。 编码器电池的检查日期为通过多功能教导器的[F6 设定]-[F7 日期与维护]-[F3 编码器电池]设定的日期。 |
| [电机OFF执行中输出IONo] | 指定电机OFF执行中处于ON状态的I/O编号。 不能在电机OFF执行期间使电机ON。通过该信号进行确认。(例如:从手动模式切换至自动模式) 请将指定的I/O编号设定为通用输出。不输出时指定为“-1”。 |
| [32bit错误编号输出IONo] | 指定输出32bit错误编码的I/O编号。将指定的I/O编号作为开头,使用通用输出32点。 不输出时指定为“-1”。 |
| [Command-Slave查询周期[ms]] (Ver.2.5.*或更高版本) |
确认Command-Slave用I/O领域的周期。周期越短则应答越快。 |
| [Field Network Cache Enabled] (Ver.1.8.*或更高版本) |
进行现场网络缓存有效/无效的设定。不使用时指定为“0”。 |
| [Field Network Cache Available Time[ms]] (Ver.1.8.*或更高版本) |
现场网络缓存有效时,设定缓存的有效时间。 |
| 可使用的功能键 | |
|---|---|
| [F1 前一页] | 显示当前显示的I/O参数表的上一页。 |
| [F2 下一页] | 显示当前显示的I/O参数表的下一页。 |
| [F3 选择编号] | 显示数字键后,如果使用数字键输入参数的编号并按压[OK],则显示目标参数。 |
| [F5 编辑] |
选择要变更的使用条件项目后,如果按压[编辑],则显示数字键或输入画面。 |
ID : 1769