
ID : 1145
机器人控制器的通信设定
为使NetBox和机器人控制器能够通过以太网通信,进行机器人控制器的通信设定。
为此,需要知道NetBox设定的IP地址。
下面以NetBox的IP地址是出厂后的值 (192.168.1.1)为前提进行说明。
1
机器人控制器的设定在机器人控制器和NetBox已通过以太网电缆连接的状态下进行。已连接时,请先拆开,待机器人控制器的设定结束后再连接。
2
用多功能教导器进行机器人控制器的通信设定。
-
进行以下操作。
操作路径:基本画面 - [F6 设定] - [F5 通信与启动权] - [F2 网络与通信权]
-
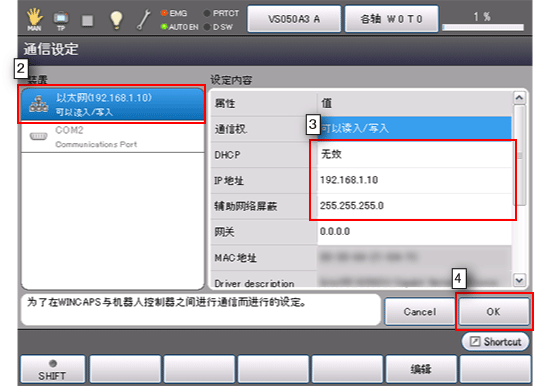
显示[通信设定]视窗,选择“以太网”。
-
按照下表进行设定。
(下表以外的项目无需变更。)
DHCP 无效 IP地址 192.168.1.10 子网掩码 255.255.255.0 -
按[通信设定]视窗的[OK]按钮。
上述设定值是一个示例。在使用的环境中发生不良时,请设定能够与NetBox通信的别的值。
3
设定结束。
通过以太网电缆连接机器人控制器和NetBox后,进行利用力感应器的力量控制功能的设定。关于功能的设定,请参照“参数的设定”。
ID : 1145