
ID : 7273
动作模式的切换方法
COBOTTA里设有普通模式和直接模式2种动作模式。
直接模式是一种在进行直接教导时使用的模式。其他操作在普通模式下进行。
在直接模式中,不可以利用远程TP/虚拟TP的键操作进行机械臂的动作以及自动运行。关于详细内容,请参照功能指南中的“动作模式”。
按照以下步骤进行动作模式的切换步骤。
切换到直接模式
按照以下步骤进行。
此外,关于直接教导的一系列步骤,请参照功能指南“直接教导”。
需要先切换为直接准备模式,以从普通模式切换为直接模式。
但是,有限制切换为直接准备模式的功能(“锁定模式”),此功能的状态可导致无法切换为直接准备模式。关于此功能,请参照“锁定模式”。
软件版本为Ver.2.8.*之后的COBOTTA可使用锁定模式。
1
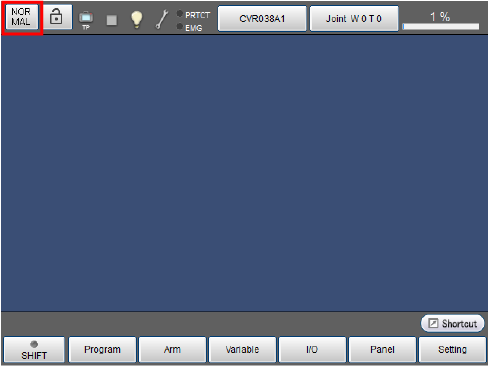
在远程TP/虚拟TP画面按下已经显示为[NORMAL]的按钮。
该模式按钮如下表所示,根据模式切换显示内容。
| 表示 | 模式 | 内容 |
|---|---|---|
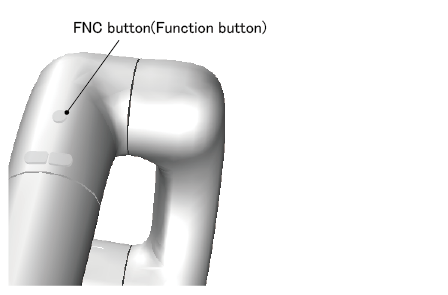
| NORMAL | 普通模式 | 可以手动操作机械臂,也可程序启动。 本模式中长按机械臂上的功能键1.5秒以上,则可解除制动器并可用手推动机械臂移动。 |
| DIRECT | 直接准备模式 | 禁止通过TP应用和I/O等操作机器人。 |
| 直接模式 | 可用手推动机械臂移动。 |
2
将显示直接准备设定画面,可根据需要进行变更。
变更完成后,按[OK]按钮。
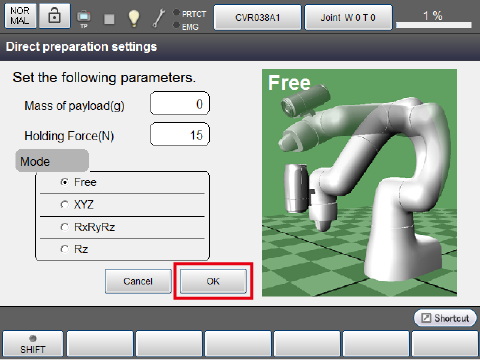
各项目内容如下所示。
电源断开之前会保持前端负载质量值。
夹治具夹持力的值在开启电源后仍然保持。
切换为普通模式之前保持辅助模式。
| 项目名 | 初始值 | 内容 |
|---|---|---|
| 前端负载质量(g) | 0 | 设定工件质量。 |
| 夹治具夹持力(N) | 15 | 设定电动夹治具的夹持力。 |
| 辅助模式 | 持续维持所有轴自由 |
位置和姿势,协助调整教导。 所有轴自由 : 可自由变更位置和姿势。 |
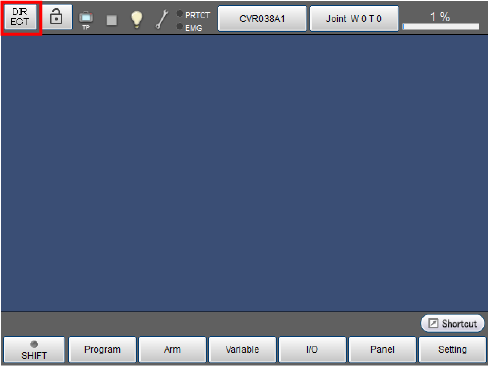
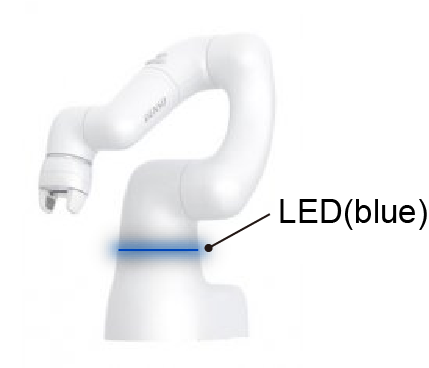
按钮变为[DIRECT]且COBOTTA的LED蓝灯会慢闪烁。
由此完成切换到直接准备模式。
3
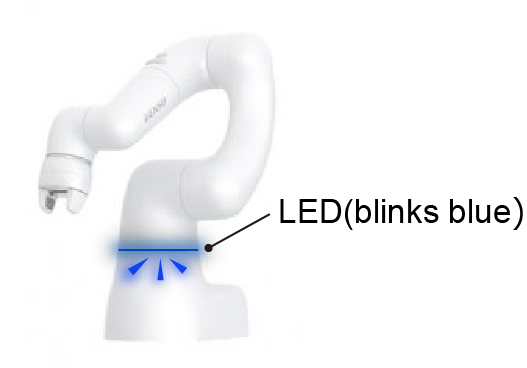
长按机械臂上的功能键1.5秒以上。
COBOTTA的LED亮蓝灯后,则说明已经切换至直接模式。
发生可复位的错误时,长按功能键1.5秒以上,则自动实施错误区域后将切换到直接模式。
但COBOTTA的LED亮红灯时,无法按以上步骤清除错误。这种情况下,通过TP应用和I/O或PacScript指令之一清除错误或执行动作准备后,请切换到直接模式。
在Ver.2.7.*之前的版本中发生可复位的错误时,长按功能键1.5秒以上,则实施错误清除,但不会切换到直接模式。再次长按功能键1.5秒以上,则切换到直接模式。
切换到通用模式。
解除直接模式和直接准备模式,则返回普通模式。
但是有限制切换为普通模式的功能(“锁定模式”),此功能的状态可导致无法切换为普通模式。关于此功能,请参照“锁定模式”。
软件版本为Ver.2.8.*之后的COBOTTA可使用锁定模式。
1
按压画面上显示为[DIRECT]的按钮。
2
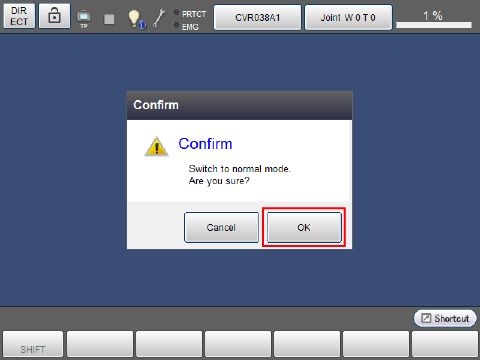
显示确认消息后,按压[OK]按钮。
Ver.2.8.*之前的软件不会显示确认消息,而是移至STEP3。
3
画面上的按钮也将显示为[NORMAL]。机械臂上的LED变成蓝色之外,符合当时状态的颜色。
ID : 7273