
ID : 7165
加减速绝对位置移动、夹持
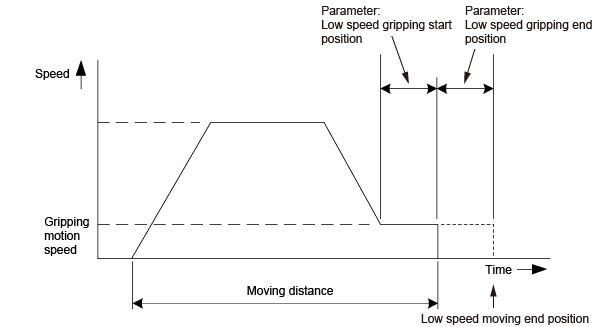
该模式下通过梯形速度控制使手指移动到指定位置前面,然后移至一定速度(夹持动作速度)的夹持动作。夹持动作中将按照指定的夹持力夹持工件。
希望变更夹持动作速度时,通过夹治具夹持速度调整功能设定。详细内容请参照“夹治具夹持速度调整功能”。
对于要在指定位置前方的哪个位置开始切换为夹持动作,可预先通过参数“62:低速夹持开始位置”进行指定。详细内容请参照“使用准备”。
如在夹持途中夹持工件,则变为Hold状态。
指定位置和低速夹持结束位置的合计距离移动完成后变为Inpos状态。
低速夹持结束位置可预先通过参数“63:低速夹持结束位置”进行指定。详细内容请参照“使用准备”。
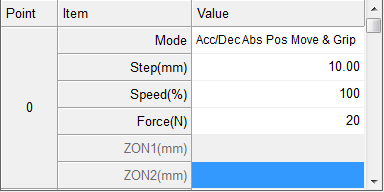
处在本模式时可指定的值如下所示。
| 移动量(mm) |
请确认要夹持的工件的宽度。 |
|---|---|
| 速度(%) | 设定可能的范围是1~100。 |
| 夹持力(N) | 设定可能的范围是6~20。 |
ID : 7165