
ID : 4027
与外部设备的通信
COBOTTA中具有从外部设备开始/停止COBOTTA动作步骤(“机器人程序”),或者是将COBOTTA的状态告知外部设备的专用通信连接器(“Mini I/O连接器”)。另外,也可以通过Ethernet收发数据。
使用选配的现场网络接口模块,可通过外部设备和现场网络进行通信。详细内容请参照“I/O (现场网络接口模块)”。
在此就通过Mini I/O连接器与COBOTTA进行通信的方法,以及通过Ethernet收发数据的方法进行说明。
也可以用编程用软件开始/停止机器人程序。
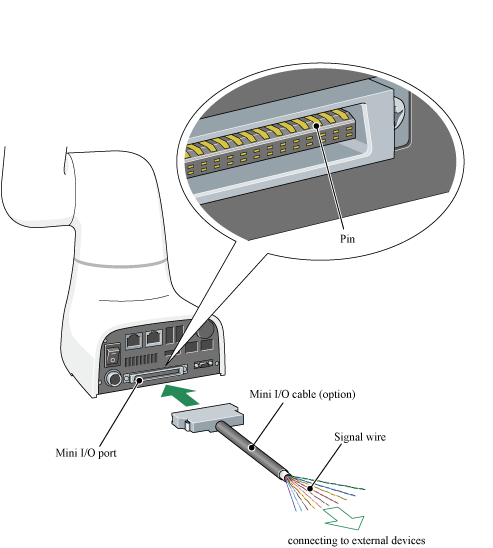
通过Mini I/O连接器与COBOTTA进行通信
COBOTTA提供了从外部设备执行开始/停止的信号(“专用输入信号”)。此外还提供了将COBOTTA状态传送到外部设备的信号(“专用输出信号”)。
Mini I/O连接器有若干个端子,并在各端子中配置有专用输入信号、专用输出信号。
具体的例子有:在专用输入信号中有“步骤停止”信号。这个信号就被配置给Mini I/O连接的11号端子。通过I/O电缆,从外部设备将该信号设成OFF后,运行的机器人系统就会停止。
另外,在专用输出信号中有“机器人运行中”的信号。这个信号就被配置给Mini I/O连接的46号端子。COBOTTA在运行机器人程序期间将该信号设成ON。外部设备根据该信号状态判断COBOTTA是否在运行机器人程序。
关于Mini I/O的详细内容请参照“I/O (Mini I/O)”。
Mini I/O中还具有安全使用COBOTTA的信号。请参照“安全使用信号”。
通过Ethernet收发数据
COBOTTA提供了通过外部设备和Ethernet收发数据的专用命令。该命令用在机器人程序中。收发的数据具体指数字及字母等字符。
使用方法诸如有:为了能根据外部设备发送的词语,使机器人执行不同的动作,只要编制出机器人程序,就可以从外部设备使COBOTTA的动作发生变化。
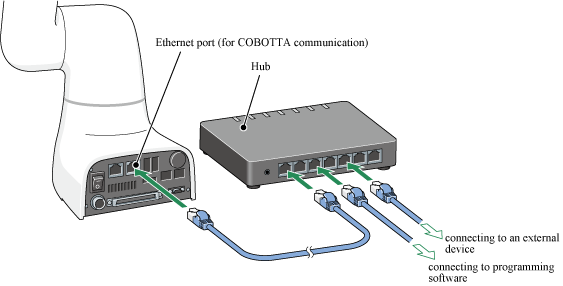
在和编程用软件的通信中,也使用COBOTTA的Ethernet连接器。并用编程用软件和外部设备时,可以用以下方法解决。
- 用市售的Hub(对Ethernet的网络进行分支的设备)进行如上图一样分支。
- 关于数据收发用命令的详细内容请参照“数据通信”。
ID : 4027