
ID : 3716
安全使用的信号
COBOTTA具有在COBOTTA做出意料外的动作时可立即停止的信号(“紧急停止输入信号”)以及,当人进入某一范围时,就会使COBOTTA停止的信号(“防护停止输入信号”)。
在此,就安全信号(安全用信号)的使用方法进行说明。
如不将“安全用信号”接线,COBOTTA将不会动作。接线方法请参照“安全用信号的连接回路”。
紧急停止输入信号
紧急停止输入信号有2种。
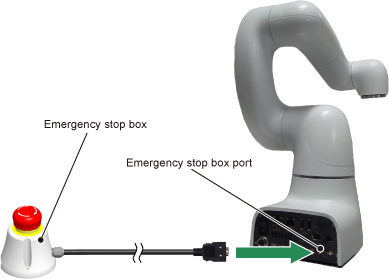
一种是针对COBOTTA单体的信号。这种信号使用购买COBOTTA时同箱包装的紧急停止箱。紧急停止箱如下图所示,连接到COBOTTA的紧急停止箱连接器。
如果在COBOTTA动作期间按下紧急停止箱上的按钮,则COBOTTA停止。
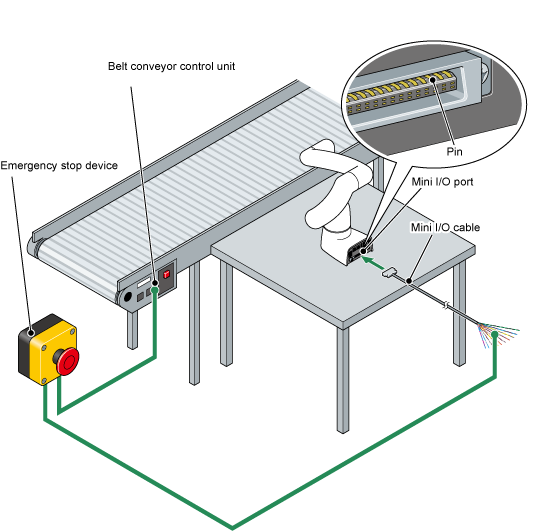
另一种是针对包含多个COBOTTA的多台设备的信号。这种信号使用配置到COBOTTA Mini I/O连接器的“外部紧急停止输入信号”(Mini I/O连接器有若干个端子,在各端子上配置各种信号)。
例如,可以是使用COBOTTA和皮带传送带的设备(请参照下图)。设备在运行期间,如果因某种原因导致无法使COBOTTA和皮带传送带全部停止,则有可能会陷入危险状态。在这种情况下应进行配线,从而能用一个紧急停止设备停止COBOTTA和皮带传送带。此时,连接到COBOTTA的配线连接至“外部紧急停止输入信号”。
外部紧急停止输入信号的详细接线方法请参照“安全用信号的连接回路”。
防护停止输入信号
COBOTTA与人和物接触时,接触力达到限制值以上,则自动停止。但是,根据让COBOTTA执行的作业不同,有时也会伴有危险(例如:用COBOTTA搬运锋利的物品)这种情况下,由客户探讨是否安全(“风险评估”)后,可能需要禁止人类进入COBOTTA的动作范囲内。针对这类设备的考虑。
如下图所示,如果存在作业人员在作业台上替换完成产品(“工件”)与未完成工件的工序,则无论如何都要将手伸入框线之中。在此类情况下,有一种可以使用光幕的方法。光幕是一种由投光器和受光器构成,用于检测人员进入的设备。其体系通常就是从投光器照射的大量光线送到受光器。如果从投光器照射的光线被人体(例如: 手)遮挡,受光器就会检测到没有光线照射到,这样就会判断有人进入。
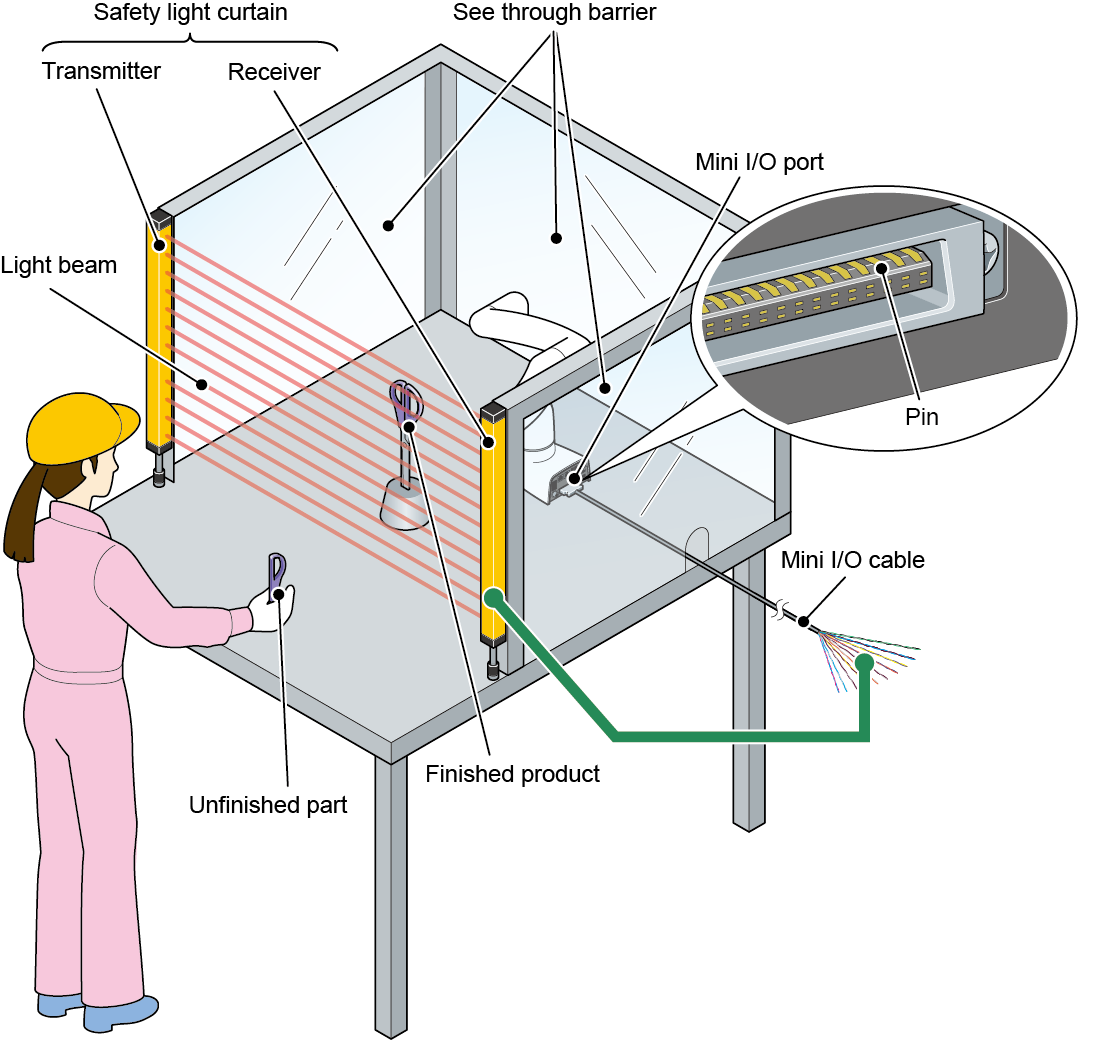
光幕将人进入情况以信号的形式输出到输入信号线。使用这个信号使COBOTTA停止。此时就会使用配置在COBOTTA Mini I/O连接器上的“防护停止输入信号”(Mini I/O连接器有若干个端子,在各端子上配置各种信号)。
将有人进入的信号通知防护停止输入信号后,COBOTTA停止。但是,COBOTTA的动作步骤(“机器人程序”)变成中途暂时停止的状态。作业人员替换工件后,如果再次开始COBOTTA的机器人程序,就可以从中途再次使COBOTTA动作。
如果COBOTTA因紧急停止入力信号而被停止,则会复位机器人程序。如果再次开始机器人程序,就会从最初重新进行。
防护停止输入信号需要让COBOTTA停止,但是之后会用于要从中途重新开始机器人程序的情况。
防护停止输入信号的详细接线方法请参照“安全用信号的连接回路”。
ID : 3716