
ID : 7259
创建动作步骤
创建COBOTTA的动作步骤(“机器人程序”)称为“编程”。编程时使用本公司的编程用软件。在客户的智能手机或平板电脑(“智能设备”)或PC中安装编程用软件,再通过安装的设备进行编程。
此外,为了记录COBOTTA臂前端的移动顺序,在编程中要让COBOTTA的臂前端移到目的位置。此时,可以直接用手移动COBOTTA的臂前端。
在此就编程用软件与COBOTTA臂前端的移动方法进行说明。
编程用软件
COBOTTA的编程用软件大致可分为4种。全部免费。
编程时,从这些软件中选择多个工具使用。
种类
Cobotta World以图标形成提供了“移动”、“按压”、“重复”等COBOTTA动作。从这些图标选择目的动作,通过组合进行编程。无需记住任何指令,可直观地进行编程。 可安装的OS为Android。 可以使用USB与COBOTTA进行通信。 |
 |
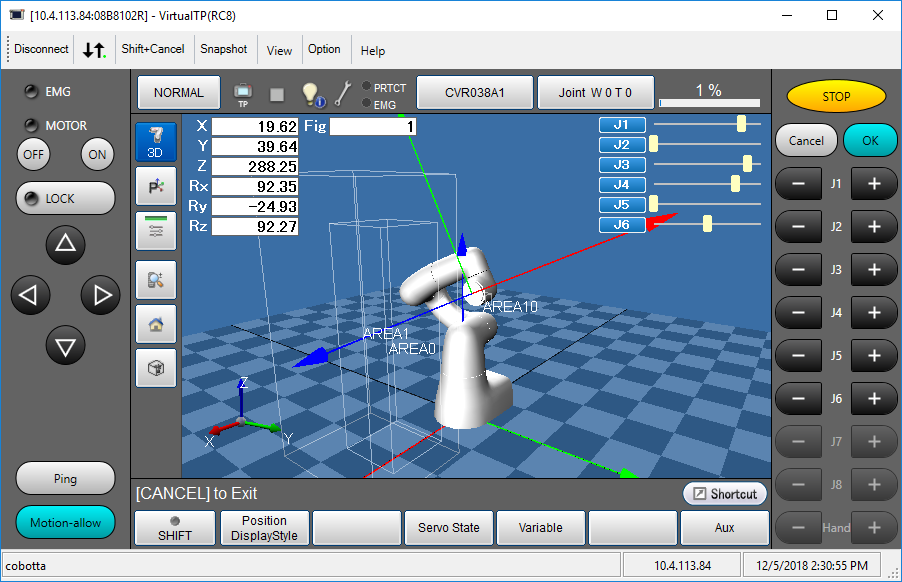
TP应用提供若干个使COBOTTA动作的指令,记述这些指令后进行编程。编程语言及操作画面与可在其他电装机器人上使用的几乎一样(编程语言为PacScript,操作画面为多功能教导器)。 根据可安装的OS,TP应用可分为2种。Windows用的名称为“虚拟TP”,Android用的名称为“远程TP”(操作方法及功能相同)。 虚拟TP可通过Ehternet与COBOTTA进行通信。 远程TP可通过USB与COBOTTA进行通信。 |
 |
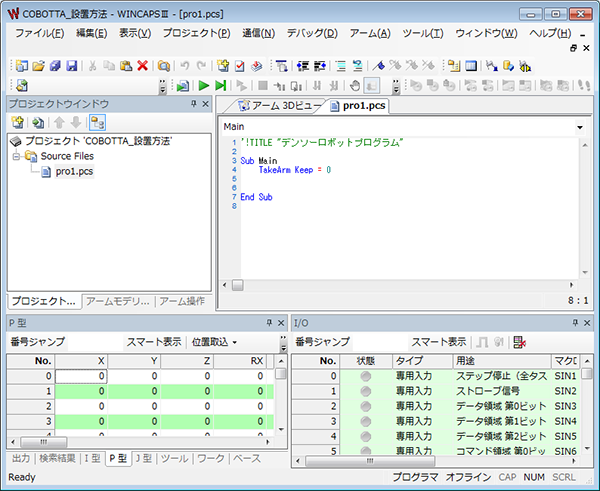
WINCAPSIIITP应用的辅助性软件。虽然编程语言与TP应用相同,但是机器人程序易编程,可管理多台COBOTTA数据。该工具也可以在其他电装机器人上使用。 可安装的OS为Windows。此外,WINCAPSIII是假定在PC上使用的产品。 可以使用Ethernet与COBOTTA进行通信。 |
 |
COBOTTA参数工具 for Android设定COBOTTA限制速度的软件。 可安装的OS为Android。 可以使用USB与COBOTTA进行通信。 此外,WINCAPSIII中也包括COBOTTA参数工具(Windows用)。因此,安装WINCAPSIII即可在Windows上使用COBOTTA参数工具。 |
 |
- 关于安装方法,请参照“软件安装"。
- 远程TP和虚拟TP及WINCAPSIII在其他电装机器人上使用时,需要付费许可证。
安装的软件组合例子
基本上都是COBOTTA参数工具和其他编程用软件的组合。
- 使用Cobotta World时
- 通过Cobotta World创建的机器人程序无法编辑除Cobotta World以外的编程用软件。因此,使用Cobotta World时组合为一种。
-
组合 OS Cobotta World + COBOTTA参数工具
Android - 使用TP应用时
- 通过TP应用和Cobotta World创建的机器人程序无法用Cobotta World编辑。因此,成为除Cobotta World以外的编程用软件组合。
-
WINCAPSIII包含COBOTTA参数工具,因此使用WINCAPSIII时,无需另行准备COBOTTA参数工具。
-
组合 OS 远程TP + COBOTTA参数工具
Android 虚拟TP + WINCAPSIII Windows 远程TP + WINCAPSIII 远程TP : Android
WINCAPSIII : Windows
(需要2台安装设备)
Android平板电脑的推荐规格
请使用支持COBOTTA的使用环境的平板电脑。
已确认动作的终端及支持OS版本可能会被更新。最新信息请参照各应用的下载页面。
| 版本 |
|
|---|---|
| 画面尺寸 | 8英寸以上 |
| 通信 |
可使用SIM,可使用USB数据连接 请注意在不符合上述推荐条件的平板电脑中,特别是Wi-Fi模型很可能无法与COBOTTA通信。 |
| 已确认动作的平板电脑(*1) |
|
*1 :没有记载支持版本的平板电脑也运行COBOTTA等软件版本。
*2 : 如果COBOTTA的软件比支持版本版本旧,有注意事项。请参照以下链接位置。
- 使用Cobotta World时: “COBOTTA的启动时间延长时”
- 使用TP应用或COBOTTA参数工具 for Android时 : “COBOTTA的启动时间延长时”
COBOTTA臂前端的移动方法
COBOTTA可以用手直接使其动作,但是在通常状态下,如果直接使其动作,则会发生错误。因为标准状态的COBOTTA会保持现在的位置。设为直接模式或制动器解除状态,以直接动作。
- 通过TP应用和Cobotta World设为直接准备模式后,长按功能键1.5秒以上,则可切换为直接模式。
- 普通模式时长按功能键1.5秒以上,则可切换为制动器解除状态。
出厂时切换为制动器解除状态的设定无效。 可通过COBOTTA参数工具设定此操作有效/无效。
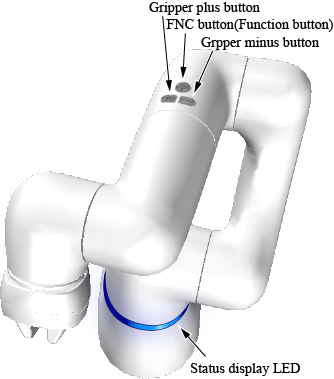
变为直接模式后,状态显示LED蓝色灯亮起。但是,如果让COBOTTA运转到可动区域界限附近,状态显示LED的黄色灯就会亮起。另外,发生错误时,黄色或红色灯亮起。
- TP应用中有可操作COBOTTA的画面。要在该画面动作时,需要切换到标准状态。
- 关于TP应用中切换直接模式和标准状态的方法,请参照“直接教导”。
- 即便变为制动器解除状态,状态显示LED的颜色也不改变。
ID : 7259