
ID : 4025
抓取/识别物体
为确保COBOTTA可抓取物体或识别物品的场所,有COBOTTA专用终端受动器(“COBOTTA用电动夹钳”、“电动真空发生器”、“AF照相机(N10-W02)”)可供选择。本文就COBOTTA用电动夹钳、电动真空发生器及AF照相机(N10-W02)进行说明。
COBOTTA用电动夹爪
通过打开/闭合2个爪(“手指”)可抓取或放开物体(“工件”)。根据工件大小,可调节抓取时手指与手指的间隔。另外还可抓取力(“夹持力”)也可调节。
打开/闭合手指的方法有以下3种。
- 按下COBOTTA的夹治具负按钮或夹治具正按钮。
- 在编程软件(Cobotta World、虚拟TP、远程TP)的夹治具操作画面操作。
- 在COBOTTA的动作步骤期间,指示打开/闭合手指。
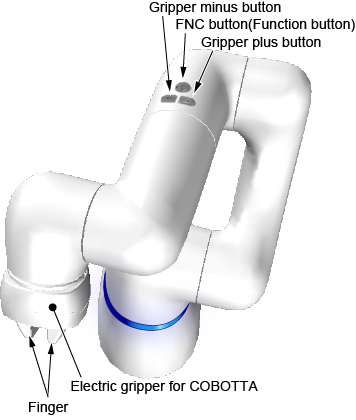
手指可拆下。通过安装客户制作的手指,可以应对各种不同形状的工件。手指拆下、安装的方法请参照“COBOTTA用电动夹钳”。
- 类似于COBOTTA用电动夹钳,安装在COBOTTA臂前端使用的设备称为“工具”。
电动真空发生器
通过电机转动泵,进行吸附和送风,可吸附或放开物体(“工件”)。根据工件大小,可调节真空垫的大小。另外还可吸附力也可调节。
运行电动真空发生器的方法有以下3种。
- 按下COBOTTA的夹治具负按钮或夹治具正按钮。
- 在TP应用(虚拟TP、远程TP)的夹治具操作画面进行操作。
- 执行PacScript的专用指令。
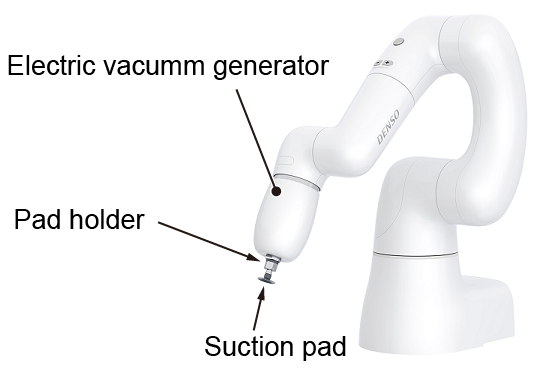
真空垫及衬垫支架可拆除。根据客户用途更换真空垫,可以应对各种不同形状的工件。关于真空垫和衬垫支架的拆卸、安装的方法请参照 “COBOTTA用电动真空发生器”。
AF照相机(N10-W02)
在COBOTTA的臂前端安装照片机,再解析照相机中显示的图像,就可以识别工件的位置。使用识别的工件位置信息,就可以使COBOTTA移动到该位置,或者是用COBOTTA用电动夹钳抓取。

COBOTTA中搭载了从照相机显示图像识别工件位置的功能。但是,在动作步骤(“机器人程序”)中使用该功能时,需要设定一些项目以执行图像识别。设定项目的编辑方法因编程用软件而异。
- Cobotta World
- 在执行图像的设定画面进行设定。
- 非Cobotta World
- 在客户的PC中安装本公司照相机用软件“EVP”,进行图像识别的设定。通过将设定的内容发送到COBOTTA,就可以在COBOTTA中使用。
- EVP是本公司照相机用软件包“RC Vison”中包含软件当中的一种,可免费使用。
- AF照相机(N10-W02)等安装到COBOTTA的臂前端使用的设备叫做“工具”。
- 如果要在其他电装机器人上使用EVP,则需要收费的许可证。
- 有关EVP的详细说明,请参照“图像处理应用程序”。
使用COBOTTA专用终端受动器时的注意事项
关于可用COBOTTA搬运的工件质量
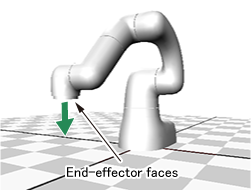
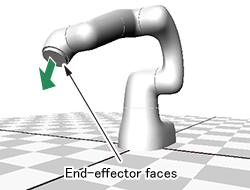
可用COBOTTA搬运的工件质量(“可搬运质量”)会根据搬运工件时的COBOTTA姿势发生变化。在没有安装COBOTTA专用终端受动器的状态下,可搬运质量如下。
| 可搬运质量 | |
|---|---|
臂前端向下(±10°以内)时:0.7kg以内
|
除左侧情况外:0.5kg以内
|
安装COBOTTA专用终端受动器后,可搬运质量会变小。各自的重量如下所示。
| 质量 | |
|---|---|
| COBOTTA用电动夹爪 | 0.2 kg |
| 电动真空发生器 | 0.31 kg (衬垫支架除外) 电动真空发生器的可搬运质量取决于真空垫直径和吸附力。请参照以下的 "电动真空发生器可搬运质量" 。 |
| AF照相机(N10-W02) |
0.15 kg 实际上这是0.18 kg (含COBOTTA用相机支架和COBOTTA臂前端Ethernet电缆),但计算可搬运质量时,则使用上述质量。 |
例如,在安装COBOTTA用电动夹钳的状态下,臂前端不向下(±10°)时,可搬运质量为
| 0.5 - 0.2 = 0.3 kg |
在安装COBOTTA用电动夹钳及AF照相机(N10-W02)的状态下,臂前端向下(±10°)时,可搬运质量为
| 0.7 - 0.2 - 0.15= 0.35 kg以内 |
。
电动真空发生器的可搬运质量
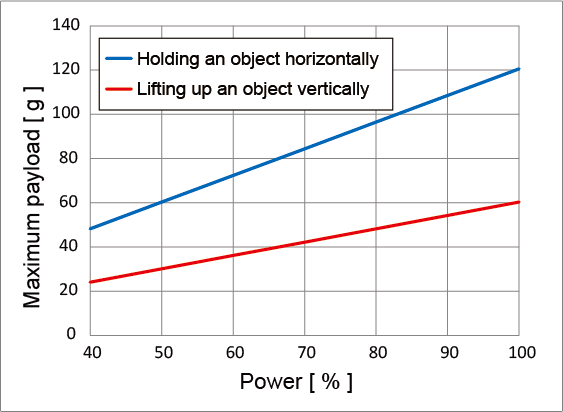
电动真空发生器的可搬运质量取决于真空垫直径和吸附力(功率)。
以下是使用出厂时配套的φ20真空垫时的可搬运质量大致标准图。
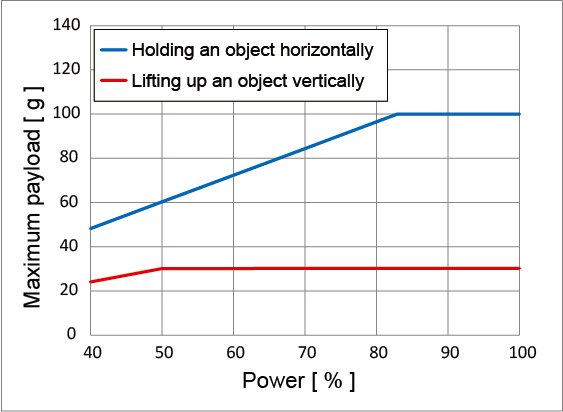
装有AF照相机(N10-W02)时,工件的重量请控制在100[g]以下。有可能会超过COBOTTA的可搬运质量。
以下是同时使用出厂时配套的φ20真空垫和AF照相机(N10-W02)时的可搬运质量大致标准图。
在可搬运质量的大致标准图表中,虽然已充分考虑安全率,但请根据需要实际进行吸附试验后再确认。
关于电动真空发生器的连续运转时间
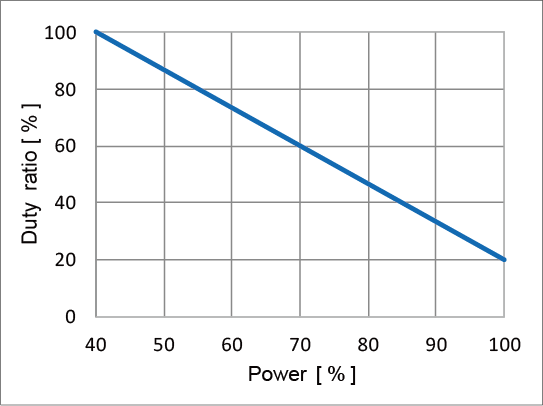
根据设定的功率,请在1个循环中设足够的停止时间后使用。
1个循环中可连续动作的大致时间标准请参照以下图表。
| Duty比[%] = 100 * 1个循环中的电动真空发生器运转时间 / 1个循环动作时间 |
如果持续长时间吸附,电动真空发生器会达到高温,可能会烫伤。请避免连续吸附5分钟以上。
ID : 4025