
ID : 7307
碰撞检测时的对策
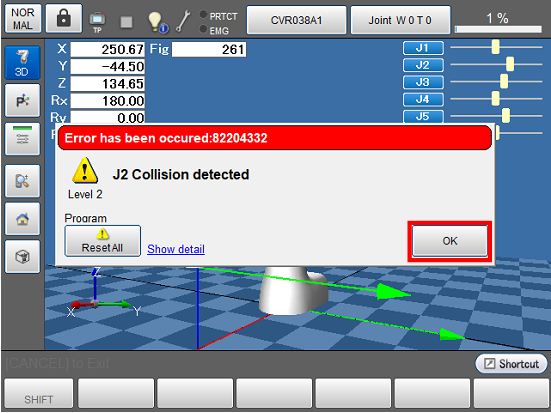
在碰撞检测功能有效的状态下检测碰撞后,机器人停止并发生[0x8220433* : *轴:检测到碰撞。]的错误。对检测到碰撞的轴显示错误消息。
如果按压[OK],则可清空错误消息。
在机器人或工具接触设备等的状态下停止时,即便清空错误消息,可能也会发生碰撞检测错误。
退避机器人时,会暂时设为电机OFF状态。然后,请通过以下之一的方法退避。
- 切换到直接模式后,用手操作机械臂进行退避。
- 将碰撞检测功能设为无效后通过手动操作退避。
此外,避免这种现象的方法包括有,在碰撞检测后置于轴自由状态再停止的设定。详情请参照“碰撞检测时的轴自由设定”。
ID : 7307