
ID : 1164
开始原点复位动作
在执行原点复位动作前,从指定的原点和记录的控制Log生成原点复位动作的轨道。生成轨道后成后可执行原点复位动作。
原点复位动作请务必将设定降至可安全停止的速度后再使用。
轨道的生成及原点复位动作的执行可通过PacScript的专用指令或远程TP/虚拟TP执行。
通过专用指令生成轨道时,请从专用指令执行原点复位动作。同时,通过远程TP/虚拟TP生成轨道时,请从远程TP/虚拟TP执行原点复位动作。不可使用以不同方法生成的轨道,执行原点复位动作。
- 控制Log的最终位置和COBOTTA当前位置的位置关系符合以下任意一个时,将不可使用PacScript专用指令进行原点复位动作。这时,请通过远程TP/虚拟TP执行原点复位。
- 臂前端位置距离20[mm]以上。
- 有距离角度9.14[deg]以上的轴。
- RC8功能扩展IPC组件可连接多个COBOTTA及RC8系列机器人控制器。
但是,在RC8功能扩展IPC组件计算原点复位路径时,不可通过其他COBOTTA或RC8系列机器人控制器执行原点复位路径的请求。如果无法执行,则会显示错误。
显示错误时,请在原点复位路径计算完成后,重新请求计算原点复位路径。
使用专用指令时
专用指令可在普通模式时使用。
使用专用指令时,1次Log获取只能计算1次原点复位动作的轨道。
通过专用指令计算轨道后,希望复位到其他原点时,请使用远程TP/虚拟TP。
CalcBackTraceLog
指定执行指令时希望复位的原点。
根据指定的原点和记录的控制Log计算路径,生成原点复位动作轨道的指令。
指令的详细内容请参照指令参考 "CalcBackTraceLog" 。
MoveBackTraceLog
在生成的轨道上使COBOTTA进行原点复位动作的指令。
如果没有在指令执行前生成原点复位动作的轨道,将发生错误。
指令的详细内容请参照指令参考 "MoveBackTraceLog" 。
使用远程TP/虚拟TP时
通过远程TP/虚拟TP进行的操作可在普通模式时使用。
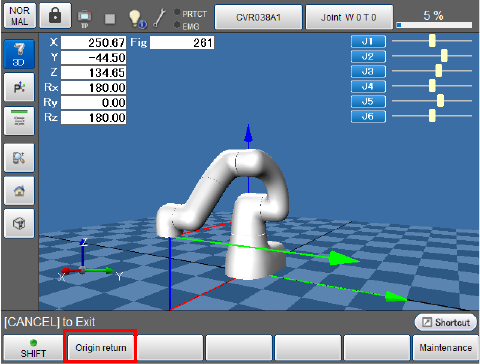
操作路径:[F2 机械臂]-[F7 原点复位]
1
在机械臂画面按下[F7 原点复位]。
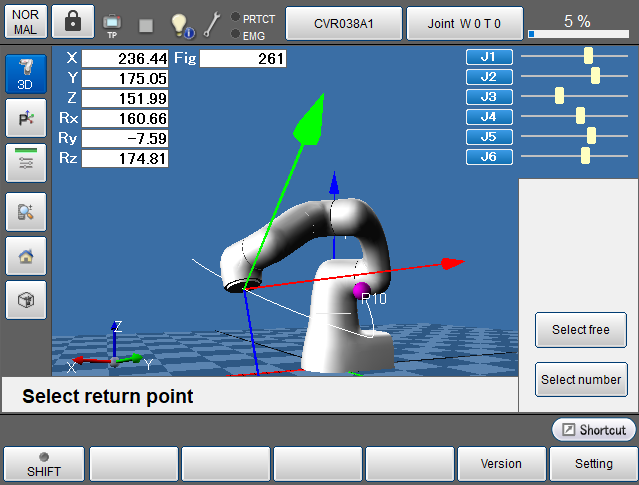
2
从以下选项中指定复位位置。
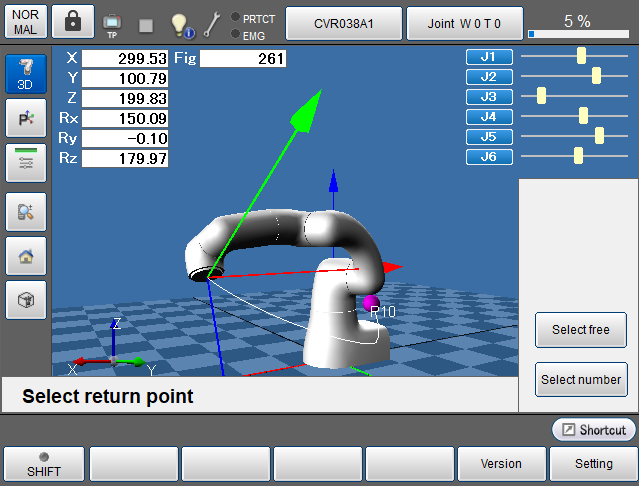
| 选项 | 内容 |
|---|---|
| 自由选择 | 根据原点位置指定目标位置。 轨道上的浅蓝色圆圈即为复位位置。 |
| 选择编号 | 根据原点位置指定复位位置。 -1: 用SysLog.Ctrl.UserData在最后记录的原点 不可指定0。 |
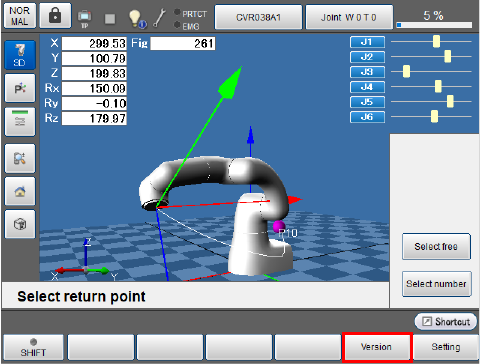
在复位地点选择画面按下F5 [版本],可确认RC8功能扩展IPC组件的原点复位路径计算软件的版本。
3
计算原点复位动作的轨道。
记录的COBOTTA动作时间越长,计算原点复位动作轨道就越耗时。
如果原点复位的控制Log最终位置和COBOTTA的当前位置不同,在原点复位动作轨道中的点以最短、且4~6轴的位移量较少的点作为开始点,生成轨道。
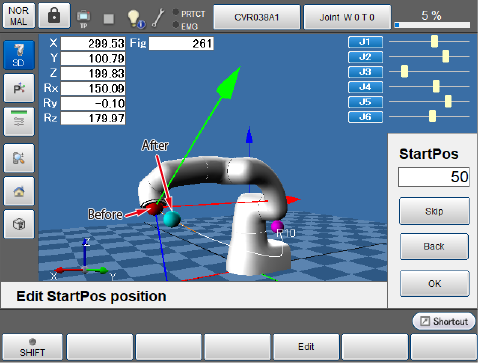
4
指定开始位置的编号,可变更原点复位动作的开始位置。
轨道上的红色圆圈为变更前的原点复位动作开始位置。
浅蓝色的圆圈则为变更后的原点复位动作开始位置。
该设定可以跳过。
在变更原点复位动作开始位置的情况下,如果执行原点复位动作,COBOTTA就会从当前停止位置向原点复位动作的开始位置进行PTP动作。到达原点复位动作的开始位置后,在生成的轨道上动作。
由于从COBOTTA的当前停止位置到变更后原点位置动作的开始位置的轨道并不是根据控制Log生成,因此不能保证对外部设备等进行干涉。
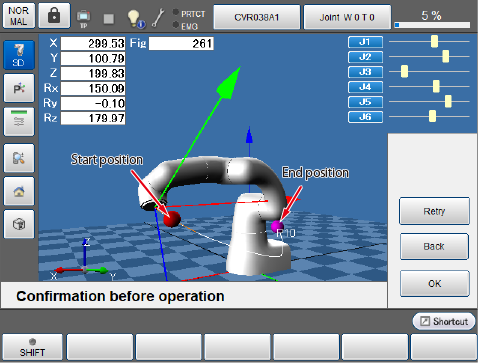
5
在执行原点复位动作前进行确认。
轨道上的红色圆圈为原点复位动作的开始位置。
粉红色的圆圈为原点复位动作的结束位置。
6
若为远程TP,则同时按下[动作许可]键和[OK]键期间动作;若为虚拟TP,则同时按住键盘的[Shift]键和[OK]键期间动作后,执行原点复位动作。
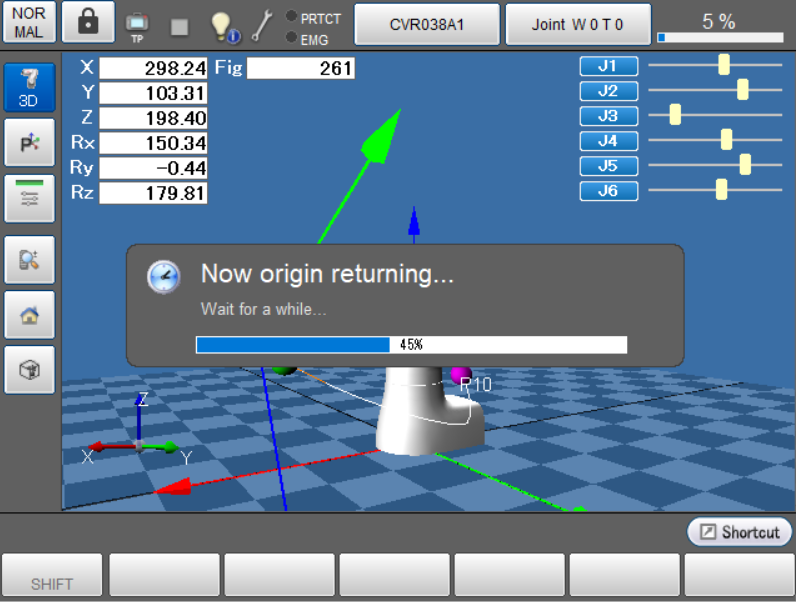
7
原点复位动作完成后,返回复位地点选择画面。
ID : 1164