
ID : 7259
動作手順を作成する
COBOTTAの動作手順 ("ロボットプログラム") を作成することを"プログラミング"と呼びます。プログラミングをするには、弊社のプログラミング用ソフトウェアを使用します。プログラミング用ソフトウェアを、お客様のスマートフォンやタブレット ("スマートデバイス")、またはPCにインストールしていただき、インストールした機器でプログラミングします。
また、プログラミングでは、COBOTTAの手先の移動順序を記録するために、COBOTTAの手先を目的の位置へ移動させます。その際、直接手でCOBOTTAの手先を移動させることができます。
ここでは、プログラミング用ソフトウェアとCOBOTTAの手先の移動方法について説明します。
プログラミング用ソフトウェア
COBOTTAのプログラミング用ソフトウェアは、大きく分けて4種類あります。すべて無料です。
プログラミングする際は、これらのソフトウェアの中から、複数のツールを選択して使用します。
種類
Cobotta World"動く"、"押す"、"繰返す"などのCOBOTTAの動作が、アイコンとして用意されています。それらのアイコンから目的の動作を選び、組合わせていくことでプログラミングを行います。いくつものコマンドを覚える必要がなく、直感的にプログラミングできます。 インストール可能なOSはAndroidです。 COBOTTAとの通信には、USBを使用できます。 |
 |
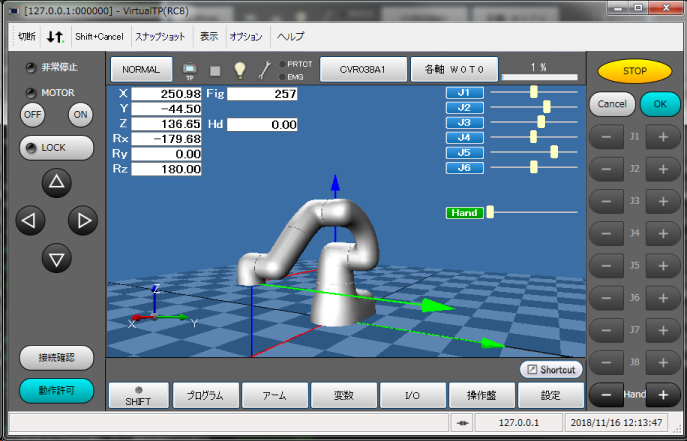
TPアプリCOBOTTAを動作させるいくつかのコマンドが用意されており、それらのコマンドを記述してプログラミングを行います。プログラミング言語や操作画面は他のデンソーロボットでも使用されているものとほぼ同じです (プログラミング言語はPacScript、操作画面はティーチングペンダント)。 TPアプリは、インストール可能なOSによって2種類に分かれています。Windows用が"バーチャルTP"、Android用が"リモートTP"という名前です (操作方法や機能は同じです)。 バーチャルTPは、EhternetでCOBOTTAと通信できます。 リモートTPは、USBでCOBOTTAと通信できます。 |
 |
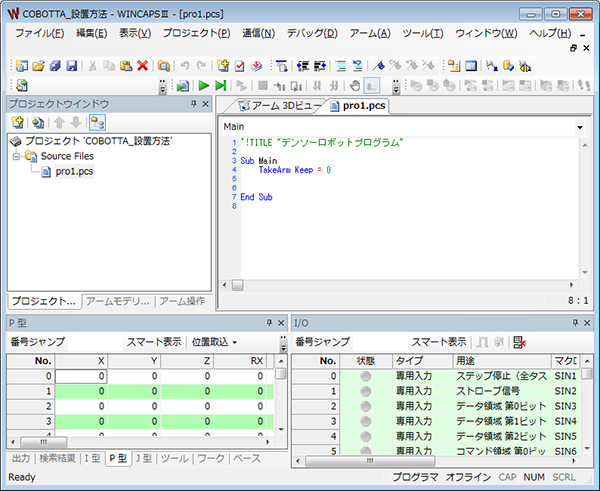
WINCAPSIIITPアプリの補助的なソフトウェアです。プログラミング言語はTPアプリと同じですが、ロボットプログラムの編集がしやすく、複数台のCOBOTTAのデータを管理することができます。このツールも他のデンソーロボットで使用されています。 インストール可能なOSはWindowsです。なお、WINCAPSIIIは、PCでの使用を想定した製品です。 COBOTTAとの通信には、Ethernetを使用できます。 |
 |
COBOTTAパラメータツール for AndroidCOBOTTAの制限速度を設定するソフトウェアです。 インストール可能なOSはAndroidです。 COBOTTAとの通信には、USBを使用できます。 なお、WINCAPSIIIにはCOBOTTAパラメータツール (Windows用) も含まれています。したがって、WINCAPSIIIをインストールしていただければ、WindowsでCOBOTTAパラメータツールを使用することができます。 |
 |
- インストール方法については、"ソフトウェアインストール" を参照してください。
- リモートTPとバーチャルTPおよびWINCAPSIIIは、他のデンソーロボットで使用する場合、有料のライセンスが必要です。
インストールするソフトウェアの組合わせ例
基本的に、COBOTTAパラメータツールと他のプログラミング用ソフトウェアの組合わせとなります。
- Cobotta Worldを使用する場合
- Cobotta Worldで作成したロボットプログラムは、Cobotta World以外のプログラミング用ソフトウェアでは編集できません。したがって、Cobotta Worldを使用する場合、組合わせは一つです。
-
組合わせ OS Cobotta World + COBOTTAパラメータツール
Android - TPアプリを使用する場合
- TPアプリおよび、WINCAPSIIIで作成したロボットプログラムは、Cobotta Worldで編集できません。したがって、Cobotta World以外のプログラミング用ソフトウェアの組合わせになります。
-
WINCAPSIIIにはCOBOTTAパラメータツールが含まれているので、WINCAPSIIIを使用する場合は、別途COBOTTAパラメータツールを用意する必要はありません。
-
組合わせ OS リモートTP + COBOTTAパラメータツール
Android バーチャルTP + WINCAPSIII Windows リモートTP + WINCAPSIII リモートTP : Android
WINCAPSIII : Windows
(インストールする機器が2台必要となります)
Androidタブレットの推奨仕様
COBOTTAの使用環境に対応しているタブレットを使用してください。
動作確認済み端末や対応OSバージョンは更新されている可能性があります。最新情報は各アプリのダウンロードページを参照してください。
| バージョン |
|
|---|---|
| 画面サイズ | 8インチ以上 |
| 通信 |
SIMが使用可能であり、USBテザリングが使用可能なもの 上記推奨条件に当てはまらないタブレットの内、特にWi-Fiモデルは、COBOTTAとの通信ができない可能性が高いのでご注意ください。 |
| 動作確認済みタブレット (*3)(*4) |
|
*1: ソフトバージョン1.10.2以降のCobotta Worldは、Android 9.0以降のバージョンで使用可能です。
*2: ソフトバージョン1.5.1以降のリモートTPは、Android 9.0以降のバージョンで使用可能です。
*3: 対応バージョンを記載していないタブレットは、COBOTTAのどのソフトウェアバージョンに対しても動作します。
*4: COBOTTAのソフトウェアが対応バージョンより古い場合、注意事項があります。下記リンク先を参照してください。
- Cobotta World使用時 : "COBOTTAの起動時間が長くなる場合"
- TPアプリまたは、COBOTTAパラメータツール for Android使用時 : "COBOTTAの起動時間が長くなる場合"
COBOTTAの手先の移動方法
COBOTTAは手で直接動作させることができますが、通常の状態で直接動作させるとエラーが発生してしまいます。通常状態のCOBOTTAは、今いる位置を保とうとしているからです。直接動作させるには、ダイレクトモードまたはブレーキ解除状態にします。
- TPアプリやCobotta Worldでダイレクト準備モードにしてから、ファンクションボタンを1.5秒以上長押しすることで、ダイレクトモードに切り替えることができます。
- 通常モード時にファンクションボタンを1.5秒以上長押しすることで、ブレーキ解除状態に切り替えることができます。
工場出荷時、ブレーキ解除状態への切り替えは無効の設定になっています。 COBOTTAパラメータツールでこの操作の有効/無効を設定できます。
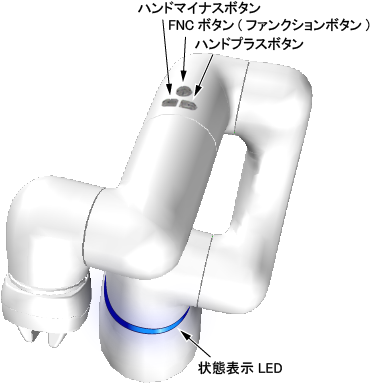
ダイレクトモードになると、状態表示LEDが青色で点灯します。ただし、COBOTTAを可動域の限界付近まで動作させると、状態表示LEDは黄色で点滅します。また、エラーが発生した時は黄色、もしくは赤色で点灯します。
- TPアプリには、COBOTTAを操作できる画面があります。その画面で動作させる場合は、通常の状態であることが必要です。
- TPアプリで、ダイレクトモードと通常状態を切り替える方法については、"ダイレクトティーチング"を参照してください。
- ブレーキ解除状態になっても、状態表示LEDの色は変わりません。
ID : 7259