
ID : 7162
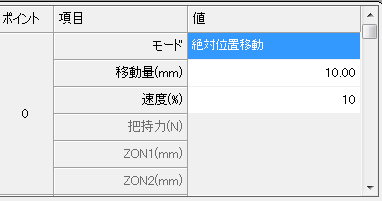
絶対位置移動
指定した位置へフィンガを移動するモードです。
指定した位置への移動が完了したらInpos状態になります。
指定可能な値は以下の通りです。
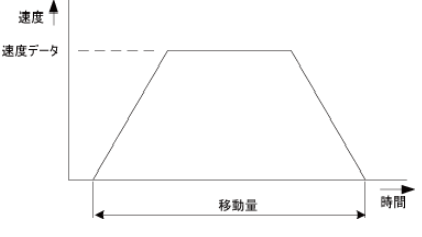
| 移動量(mm) |
設定可能な範囲は、右フィンガの閉方向ソフトウェアリミット~開方向ソフトウェアリミットです。 初期値では0mm~30mmに設定されています。 |
|---|---|
| 速度(%) |
設定可能な範囲は1~100です。 |
- 絶対位置移動あるいは相対位置移動の動作でワークを把持した場合、過電流や位置偏差過大、モータ過負荷のエラーが出る可能性があります。ワークを把持する場合は把持動作のコマンドを使用し、絶対位置移動あるいは相対位置移動の動作はワークを離す場合もしくは爪を移動させる場合に使用してください。
-
ワークを開放する場合、下記のようにしてください。
- フィンガを閉じて把持した場合
- ワークの幅より1mm以上開く。
- フィンガを開いて把持した場合
- ワークの幅より1mm以上閉じる。
詳細は"ワークの開放方法"を参照してください。
ID : 7162