
ID : 4027
外部機器との通信
COBOTTAには、COBOTTAの動作手順("ロボットプログラム")を外部機器から開始/停止したり、COBOTTAの状態を外部機器に知らせたりするための専用の通信コネクタ("Mini I/Oコネクタ")があります。また、Ethernetでデータの送受信を行うこともできます。
オプションのフィールドネットワークインターフェースモジュールを使用すると、外部機器とフィールドネットワークで通信することができます。詳細は、"I/O(フィールドネットワークインターフェースモジュール)" を参照してください。
ここでは、Mini I/Oコネクタを介してCOBOTTAと通信する方法と、Ethernetを介してデータの送受信を行う方法について説明します。
プログラミング用ソフトウェアでもロボットプログラムを開始/停止することができます。
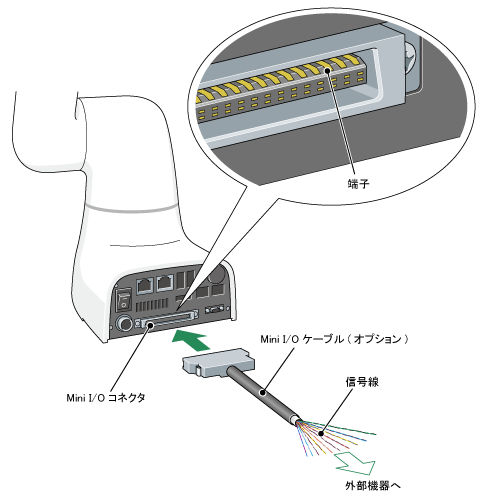
Mini I/Oコネクタを介してCOBOTTAと通信する
COBOTTAには、外部機器から開始/停止するための信号("専用入力信号")が用意されています。また、COBOTTAの状態を外部機器に伝えるための信号("専用出力信号")も用意されています。
Mini I/Oコネクタにはいくつかの端子があり、各端子には、専用入力信号または、専用出力信号が割付けられています。
具体的な例として、専用入力信号の中には、"ステップ停止"という信号があります。これは、Mini I/Oコネクタの11番端子に割付けられています。この信号を、I/Oケーブルを介して、外部機器からOFFにすると、動いていたロボットプログラムが停止します。
また、専用出力信号の中には、"ロボット運転中"という信号があります。これは、Mini I/Oコネクタの46番端子に割付けられています。COBOTTAはロボットプログラムを動かしている最中は、この信号をONにします。外部機器は、この信号の状態から、COBOTTAがロボットプログラムを動かしているかどうかが分かります。
Mini I/Oについての詳細は、"I/O (Mini I/O)"を参照してください。
Mini I/Oには、COBOTTAを安全に使用するための信号もあります。"安全に使用するための信号"を参照してください。
Ethernetを介してデータの送受信を行う
COBOTTAには、外部機器とEthernetを介してデータを送受信するための、専用の命令が用意されています。この命令は、ロボットプログラムの中で使用します。送受信するデータとは、具体的には、数字やアルファベットなどの文字です。
使用方法として、例えば、外部機器から送られる単語によって、COBOTTAが違う動作をするように、ロボットプログラムを作れば、外部機器から、COBOTTAの動作を変化させることができます。
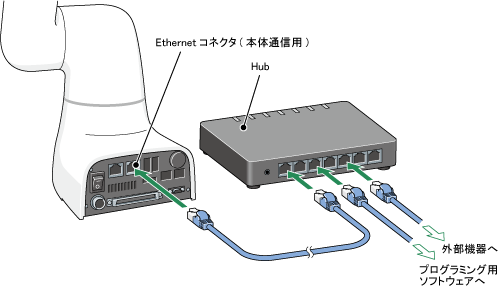
COBOTTAのEthernetコネクタは、プログラミング用ソフトウェアとの通信にも使用します。プログラミング用ソフトウェアと外部機器を併用する場合は、次の方法で対応できます。
- 市販のHub(Ethernetのネットワークを分岐する機器)で上の図のように分岐する。
- データ送受信用の命令の詳細については、"データ通信"を参照してください。
ID : 4027