
ID : 7538
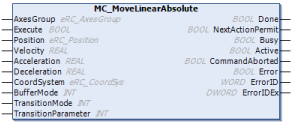
MC_MoveLinearAbsolute
通过直线插补控制将机器人移动到目标位置。通过位置坐标(点型)指定目标位置。
| 图形显示 | FB范畴 |
|---|---|
 |
动作 |
输入输出变量
| 变量名 | 数据型 | 有效范围 | 初始值 | 省略 |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | 不可以 | ||
|
||||
输入变量
| 变量名 | 数据型 | 有效范围 | 初始值 | 省略 |
|---|---|---|---|---|
| Execute | BOOL |
|
FALSE | 不可以 |
|
||||
| Position | eRC_Position | 不可以 | ||
|
||||
| Velocity | REAL | 0.1~100.0 | -1.0 | 可以 |
|
||||
| Acceleration | REAL | 0.0001~100.0 | -0.1 | 可以 |
|
||||
| Deceleration | REAL | 0.0001~100.0 | -0.1 | 可以 |
|
||||
| CoordSystem | eRC_CoordSys |
|
|
可以 |
|
||||
| BufferMode | INT | 0,1,6,7,8,9 | 0 | 可以 |
[ 0 : Aborting OP0(中断) ]
[ 1 : Buffered(保持) ]
[ 6 : Blending(混在) ]
[ 7 : Aborting OP1(中断) ]
[ 8 : Aborting OP2(中断) ]
[ 9 : Aborting OP3(中断) ]
|
||||
| TransitionMode | INT | 0,3,10,11 | 0 | 可以 |
|
||||
| TransitionParameter | INT | 0~32767 | -1 | 可以 |
|
||||
输出变量
| 变量名 | 数据型 / 说明 |
|---|---|
| Done | BOOL |
|
|
| NextActionPermit | BOOL |
|
|
| Busy | BOOL |
|
|
| Active | BOOL |
|
|
| CommandAborted | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | WORD |
|
|
| ErrorIDEx | DWORD |
|
功能说明
- 关于直线插补控制
- 直线插补控制是对到达动作目标位置的路径进行直线式的插补控制。
下图表示直线插补控制的动作示例。
注意事项
若要执行这个FB,需要事先将FB范畴"动作"的FB设为可执行状态。
若要将FB范畴"动作"的FB设为可执行状态,使用FB"MC_Power"。
ID : 7538