
ID : 7416
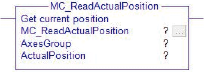
MC_ReadActualPosition
返回机器人的当前位置。
| 图形显示 | AOI范畴 |
|---|---|
 |
特殊 |
输入输出变量
| 变量名 | 数据型 | 有效范围 | 输入输出条件 |
|---|---|---|---|
| AxesGroup | eRC_AxesGroup | - | |
|
|||
| ActualPosition | eRC_PosDensoRobot | 输出用 | |
|
|||
输入变量
-
输出变量
-
功能说明
返回指定的机器人的当前位置。用于通过显示器进行监视的情形等。
注意事项
-
ID : 7416
![]()
ID : 7416
返回机器人的当前位置。
| 图形显示 | AOI范畴 |
|---|---|
|
特殊 |
| 变量名 | 数据型 | 有效范围 | 输入输出条件 |
|---|---|---|---|
| AxesGroup | eRC_AxesGroup | - | |
|
|||
| ActualPosition | eRC_PosDensoRobot | 输出用 | |
|
|||
-
-
返回指定的机器人的当前位置。用于通过显示器进行监视的情形等。
-
ID : 7416