
ID : 5908
力量控制log设定的显示、变更
操作路径:[F2 机械臂] - [F2 力量控制] - [F2 Force Control Log] - [F6 设定]
进行力量控制log获取相关设定的显示、变更。
如果按压力量控制log的[F6 设定],则显示以下的[Force Control Log setting]视窗。
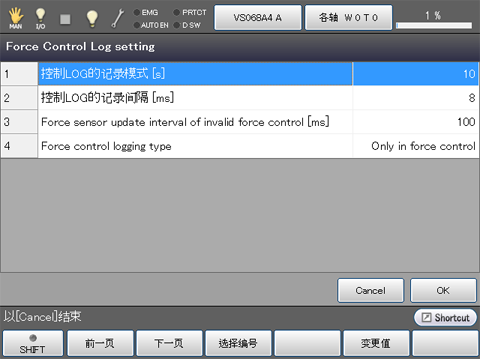
| 参数 | 单位 | 初始值 | 内容 |
|---|---|---|---|
| 控制LOG记录时间 | s | 10 | 设定控制LOG的记录时间。 |
| 控制LOG记录间隔 | ms | 8 | 设定控制log的记录间隔。 |
| 力量控制无效时的传感器更新间隔 | ms | 100 | 指定力量控制无效中的传感器数据的更新间隔。“Force Control Log setting”中指定“时常记录”时有效。 即使设定了小于“控制log记录间隔”设定值的值,也按照“控制log记录间隔”的设定值进行记录。 设定较小值时,向CPU施加负载,可能影响机器人的动作。 |
| 力量控制LOG设定 | - | 仅力量控制中记录 | 设定仅力量控制中还是始终进行力量控制log的记录。 |
| 可使用的功能键 | |
|---|---|
| [F1 前一页] | 显示当前显示的Force Control Log setting列表的上一页。 |
| [F2 下一页] | 显示当前显示的Force Control Log setting列表的下一页。 |
| [F3 选择编号] | 显示数字键后,如果使用数字键输入编号并按压[OK],则显示目标编号。 |
| [F5 变更值] |
选择要变更的项目后,如果按压[变更值],则显示数字键或输入画面。 |
ID : 5908