
ID : 5109
有效/无效设定
使用多功能教导器或者指令,进行碰撞检测功能的有效/无效设定。初始值设定为“无效”。
通过多功能教导器进行的设定在控制器电源OFF后仍然保持。在控制器电源OFF后,返回多功能教导器的设定,用指令进行设定。
关于指令的详细内容,请参照“CollisionDetection”。
自动、教导检查的设定步骤
为了将自动、教导检查模式的碰撞检测功能设为有效,首先指定工作台设定要设为有效的轴,然后指定工作台执行CollisionDetection指令。
以下表示通过多功能教导器操作的设定步骤。
要设定轴的有效/无效,有统一设定全轴的方法和个别设定轴的方法。
机器人动作中不可变更设定。
也可用SetCollisionDetection指令进行工作台的设定。设定了二者时,指令的内容优先。
统一将全轴设为有效的步骤
此方法从Ver.2.7.*起有效。
1
按压基本画面-[F2 机械臂]-[F6 辅助功能]-[F2 Collision/Interference]-[F1 碰撞检测]。

显示“设定碰撞检测”画面。
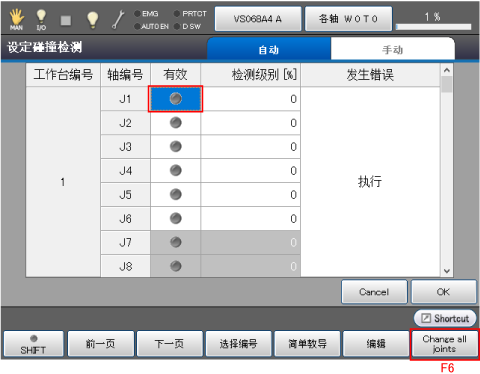
2
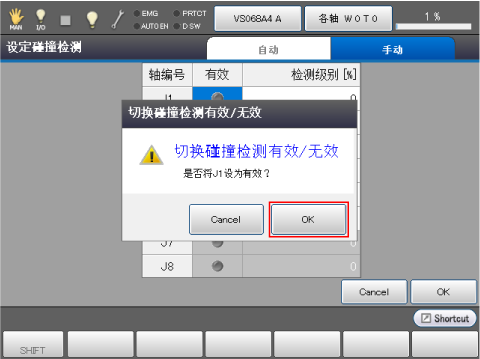
选择要将碰撞检测功能设为有效的轴编号,按[F6 全轴切换]。
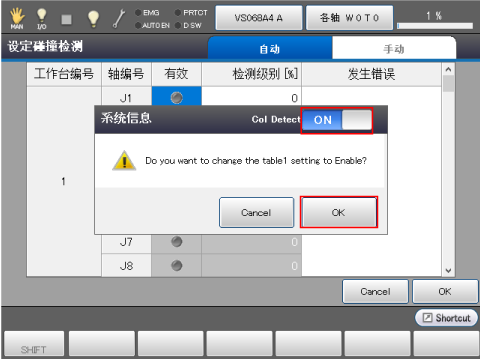
显示系统消息,将[碰撞检测]的选择按钮切换为[ON],按[OK]。
如果按压[Cancel],则不变更设定。
当[碰撞检测]为[OFF]时,按[OK]全轴变成无效。
3
如下所述,设为有效的轴显示绿色。
轴的设定完成后,按[OK]。

设定被保存,返回碰撞/干涉菜单画面。
4
如果指定已设定的工作台编号执行CollisionDetection指令,碰撞检测功能变成有效。
例:指定工作台编号1,将碰撞检测设为有效。
CollisionDetection True,1
在以下情形,通过指令设为有效的碰撞检测功能变成无效。
- 接通[MOTOR]时。
- 通过CollisionDetection指令指定了False时。
- 切换为手动模式时。
个别设定轴的步骤
在“统一将全轴设为有效的步骤”的STEP2,实施以下步骤。其他与“统一将全轴设为有效的步骤”相同。
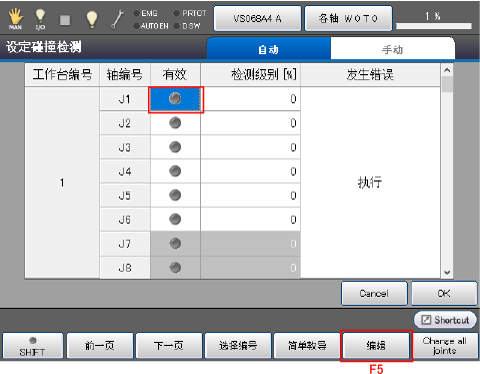
2
选择将碰撞检测功能设为有效的轴编号,按压各轴编号的[有效]或[F5 编辑]。
将显示系统讯息,没有问题则按压[OK]。
如果按压[Cancel],则不变更设定。
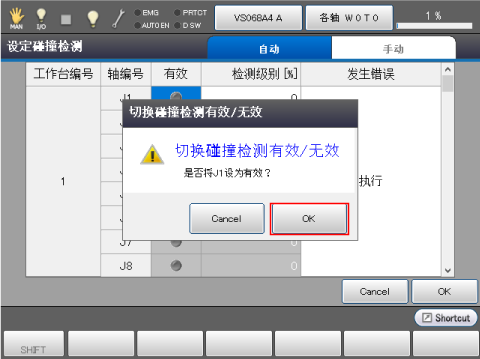
J1设为有效时,显示为绿色,如下所示。

按照上述步骤,将需要设定的全部轴设为有效。
手动模式的设定步骤
要将手动模式的碰撞检测功能设为有效,指定手动操作用工作台,设定要设为有效的轴。
以下表示通过多功能教导器操作的设定步骤。
要设定轴的有效/无效,有统一设定全轴的方法和个别设定轴的方法。
统一将全轴设为有效的步骤
1
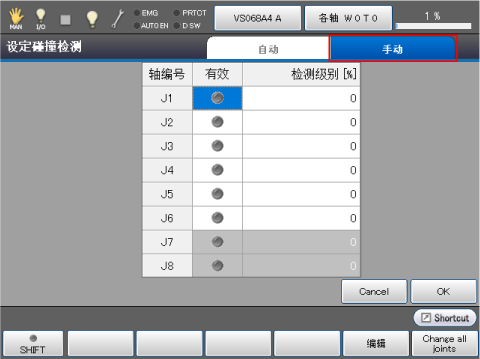
选择基本画面-[F2 机械臂]-[F6 辅助功能]-[F2 碰撞/干涉]-[F1 碰撞检测]-[手动标签]。
显示以下的画面。
2
按[F6 全轴切换]。
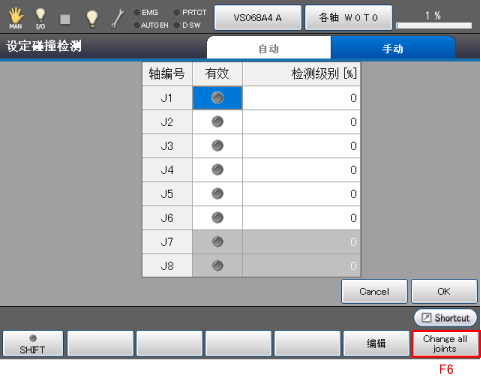
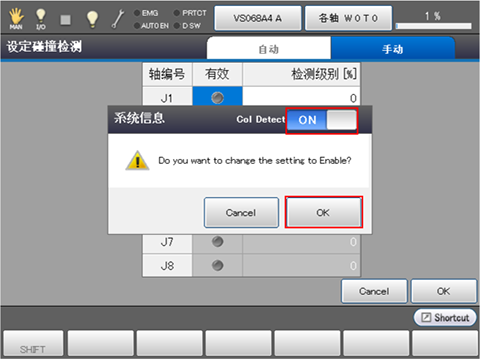
显示系统消息,将[碰撞检测]的选择按钮切换为[ON],按[OK]。
如果按压[Cancel],则不变更设定。
当[碰撞检测]为[OFF]时,按[OK]全轴变成无效。
3
如下所述,设为有效的轴显示绿色,按[OK]。

设定被保存,指定的轴的碰撞检测功能变成有效,返回碰撞/干涉菜单画面。
个别设定轴的步骤
在“统一将全轴设为有效的步骤”的STEP2,实施以下步骤。其他与“统一将轴设为有效的步骤”相同。
2
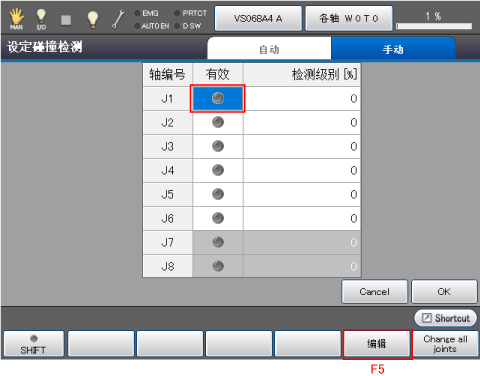
选择将碰撞检测功能设为有效的轴编号,按压各轴编号的[有效]或[F5 编辑]。
将显示系统讯息,没有问题则按压[OK]。
如果按压[Cancel],则不变更设定。
J1设为有效时,显示为绿色,如下所示。
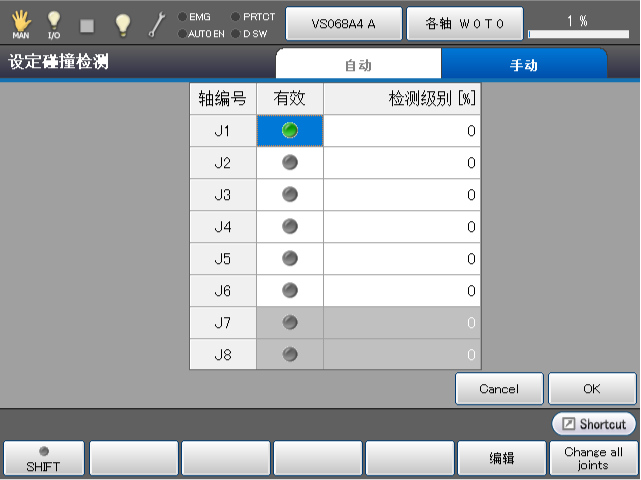
按照上述步骤,将需要设定的全部轴设为有效。
碰撞检测功能的有效状态的确认
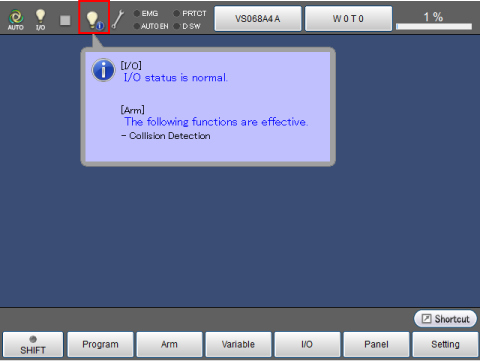
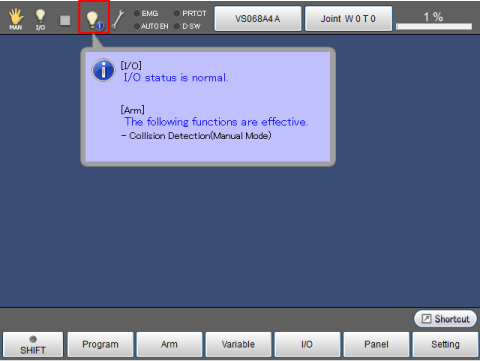
如果点击表示多功能教导器上方的机械臂状态的图标,可确认有效状态。
在自动、教导检查模式与手动模式中,显示内容不同。
在自动、教导检查模式中,功能有效时
在手动模式中功能有效时
ID : 5109