
ID : 4903
旋转半径的设定(将附加轴设为旋转轴时)
在手动动作或教导检查动作上,RC8系列机器人控制器限制机器人轴及附加轴的动作速度,以免超过250mm/sec。
将附加轴设为旋转轴时,需要将附加轴的旋转半径作为参数设定。
旋转半径参数设定上的注意事项
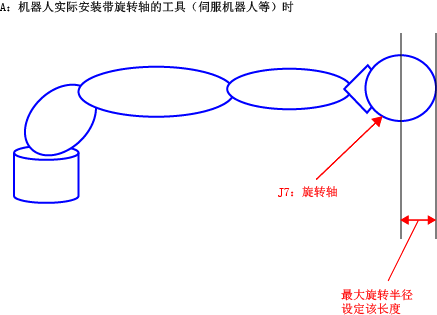
- 像“A”那样安装了机器人具有旋转轴J7的工具(伺服夹治具等)时,将该旋转轴的旋转半径作为参数设定。
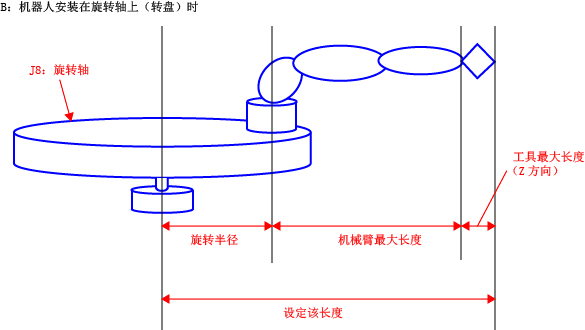
- 像“B”那样机器人被设置在旋转轴J8上(转台等)时,需要将“旋转轴的旋转半径”加上下表所示的“各机器人类型的最大臂长”、“要安装的工具的Z方向最大长度”的值作为参数设定。
- 兼有“A”和“B”,亦即机器人被设置在旋转轴J8上(转台等),且安装了具有旋转轴J7的工具(伺服夹治具等)时,需要设定与各自的轴对应的旋转半径参数。
各机器人类型的最大臂长
| 系列 | 机器人类型 | 最大臂长(mm) |
|---|---|---|
| VP | VP-5243 | 430 |
| VP-6242 | 432 | |
| VS | VS-6556 | 653 |
| VS-6577 | 854 | |
| VS-050 | 505 | |
| VS-060 | 605 | |
| VS-068 | 710 | |
| VS-087 | 905 | |
| VM | VM-6083 | 1021 |
| VM-60B1 | 1298 | |
| HS | HS-4535* | 350 |
| HS-4545* | 450 | |
| HS-4555* | 550 | |
| HSA1 | HS035A1* | 350 |
| HS045A1* | 450 | |
| HS055A1* | 550 | |
| HSR | HSR048A1* | 480 |
| HSR055A1* | 550 | |
| HSR065A1* | 650 | |
| HM | HM-4060* | 600 |
| HM-4A60* | 600 | |
| HM-4070* | 700 | |
| HM-4A70* | 700 | |
| HM-4085* | 850 | |
| HM-4A85* | 850 | |
| HM-40A0* | 1000 | |
| HM-4AA0* | 1000 |
ID : 4903