
ID : 4902
链接信息设定
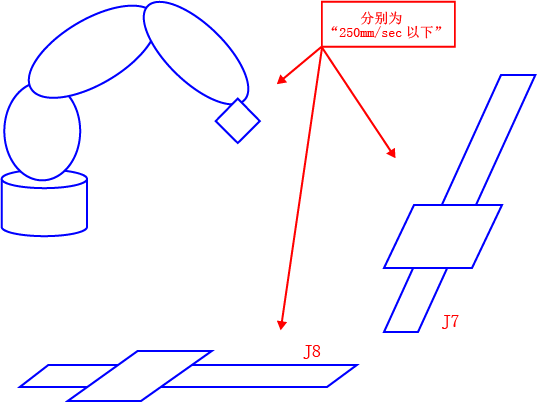
RC8系列机器人控制器在手动动作或教导检查动作上,常时监视驱动的机器人轴的动作速度,限制在250mm/sec以下。
通过手动动作或教导检查动作驱动附加轴时,也同样地限制动作速度。
通过设定机器人轴和附加轴的链接状态,常时监视驱动的轴的速度之和,可限制在250mm/sec以下。但是,由于没有考虑各轴的动作方向,与实际的合成速度不同。
什么是链接信息?
表示机器人各轴及附加轴(J7、J8)动作时是否相互影响的各轴间的关系。
将链接信息设为“链接”时,各轴的动作进入相互影响的状态。如果设为“不链接”,各轴的动作不相互影响。
机器人的全部轴被集中“链接”或“不链接”。
以下表示链接信息的设定画面的例子。
链接信息设定 WINCAPSIII画面(例子:6轴机器人)
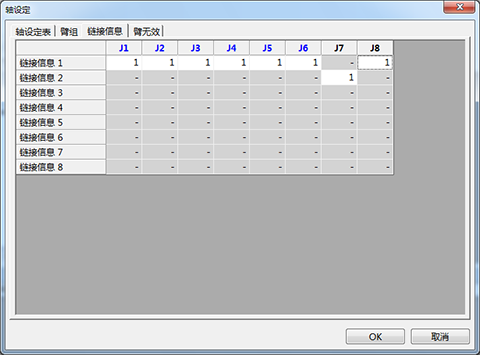
[1]表示设为“链接”的状态,[0]表示设为“不链接”的状态。
在上述的画面设定例子中:
链接信息1:由于机器人轴(J1~J6)和附加轴(J8)链接,机器人轴的动作与附加轴(J8)的动作相互影响。
链接信息2:由于附加轴(7轴)与其他的任何轴都不链接,附加轴(J7)的动作不影响机器人轴的动作及附加轴(J8)的动作。
链接信息的设定例子
以下对于机器人和附加轴的构成、此时的链接信息的设定方法,举例说明。
<例1>链接机器人轴和附加轴(J7、J8)时
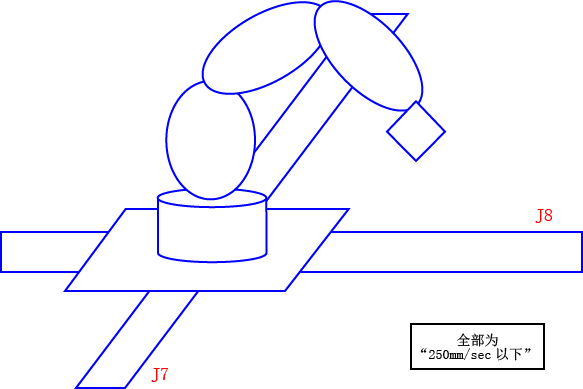
进行上图那样的构成时,由于附加轴(J7、J8)的动作影响机器人轴的动作,因此将机器人轴和附加轴(J7、J8)设为“链接”。
此时,整体成为动作速度的限制对象。
- 链接信息设定例子(6轴机器人)

<例2>链接机器人轴和附加轴(J7)时
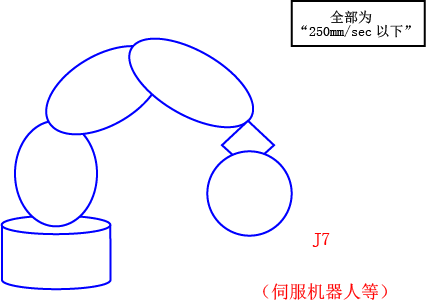
进行上图那样的构成时,由于机器人轴的动作影响附加轴(J7)的动作,将机器人轴和附加轴(J7)设为“链接”。
此时,整体成为动作速度的限制对象。
- 链接信息设定例子(6轴机器人)

<例3>不链接机器人轴和附加轴,但链接附加轴J7和J8时
进行上图那样的构成时,由于附加轴(J7、J8)的动作不影响机器人轴的动作,因此将机器人轴和附加轴(J7、J8)设为“不链接”。但是,由于J7和J8的动作相互影响,设为“链接”。
此时,机器人轴动作、附加轴动作(J7、J8)分别成为动作速度的限制对象。
但是,J7和J8的整体成为速度限制的对象。
- 链接信息设定例子(6轴机器人)

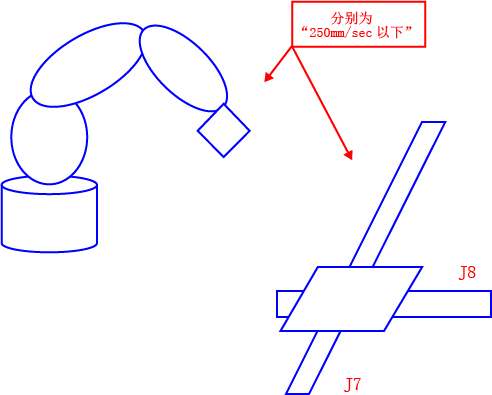
<例4>机器人轴和附加轴,附加轴J7和J8都不链接时
进行上图那样的构成时,由于附加轴(J7、J8)的动作不影响机器人轴的动作,因此将机器人轴和附加轴(J7、J8)设为“不链接”。另外,由于附加轴(J7)和附加轴(J8)互不影响动作,附加轴(J7)和附加轴(J8)也设为“不链接”。
此时,机器人轴动作、附加轴(J7)及附加轴(J8)动作分别成为动作速度的限制对象。
- 链接信息设定例子(6轴机器人)

链接信息设定方法
1
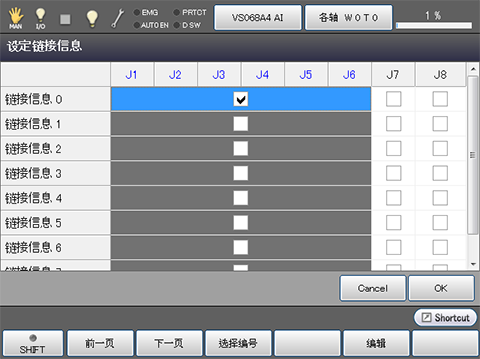
按基本画面-[F2 机械臂]-[F12 保养]-[F10 轴设定]-[F3 链接信息]。

显示“链接信息设定”画面。
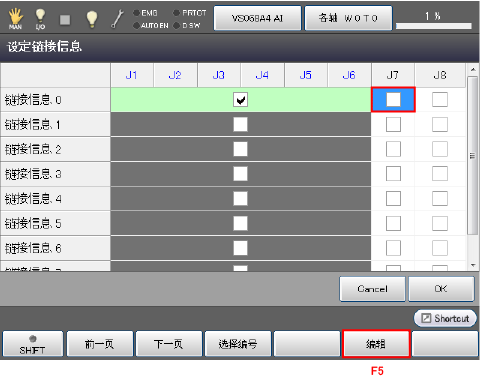
2
选择要变更链接信息的轴,按[F5 编辑]。
3
将显示是否将链接信息设为有效的系统消息,如果正确,按[OK]。
如果按压[Cancel],则不变更设定。
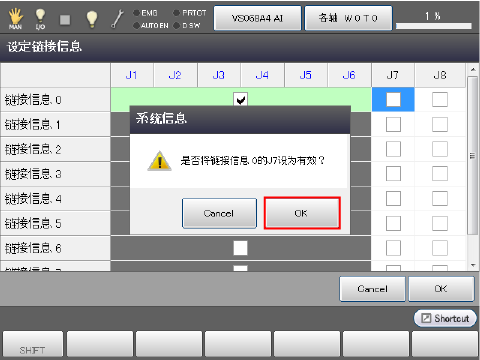
在选择的轴上显示勾选记号。
4
所有的设定完成后,按[OK]。
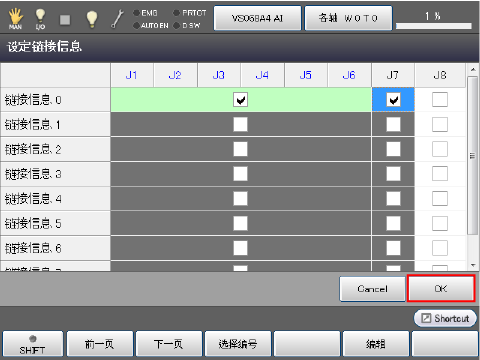
保存设定,返回“轴设定”画面。
链接信息设定上的注意事项
- 已变更的设定在下次电源接通时有效。
- 以机器人轴的单位设定机器人。例如,若是4轴机器人,从1轴到4轴被集中设为“有效”或“无效”。
-
通过链接信息选择的轴需要通过[伺服参数设定]将[设定轴的有效/无效]设为[有效]。
操作路径:[F2 机械臂]-[F12 保养]-[F7 轴设定]-[F5 伺服设定]
详细的设定方法请参照“伺服参数的设定”。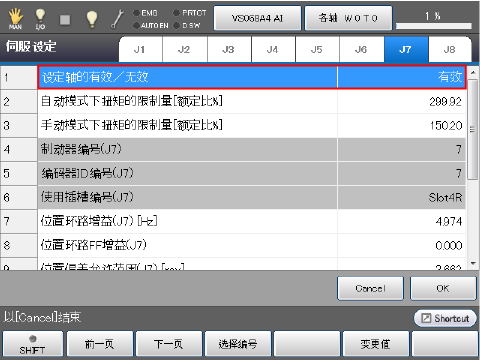
ID : 4902