
ID : 4901
附加轴的无限旋转的设定
这是即使朝相同的方向持续旋转附加轴,也不发出错误的功能。需要将附加轴的[无限旋转设定]设为[无限]。
附加轴无限旋转设定上的注意事项
- 使旋转轴朝超过±360度的位置移动时,移动完成后使其自动复位到±360度以内的位置。此时,基准位置(CALSET位置)被更改。在步骤返回动作中,不能从位置被清空时起执行前面的动作。
-
无限旋转动作命令的有效位数为7位。如果指定大的值,有时与实际的位置不同。
例
指定了Drive(5、11111115555)等的值时,
11111115555在内部被表达为1.111111*E+10,5555被省略。 - 在无限旋转中,如果1次指定的移动量大,出现数值范围外的错误。该值因齿轮比而异。
-
当作需要分度台那样的定位的旋转轴使用时,请注意以下的项目。
- 请使用减速比为整数倍的产品。如果减速比不是整数倍,因多旋转发生错位。
-
在相对动作指令中指定的动作量包含小数点以下的值时,有时会从数值表达上指定的位置朝错开的位置稍微动作。如果反复使用这样的相对动作命令,在多旋转动作后发生错位。
对于这样的情形,为避免错位需要进行补偿处理。
- 在针对基准位置(CALSET位置)以电机转速动作±32768转以上的状态,如果断开控制器电源,下次启动时有时需要CALSET。
为了避免这种情况,请在断开控制器电源前执行PosClr。
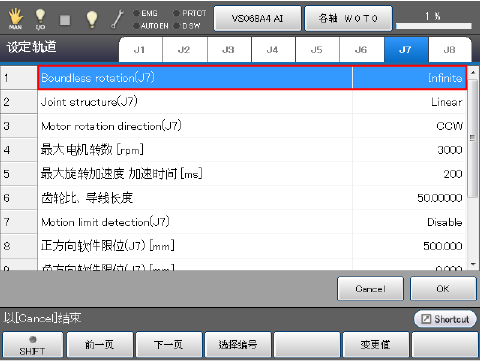
无限旋转设定方法
操作路径[F2 机械臂]-[F12 维护]-[F10 轴设定]-[F4 轨道设定]
将[轨道设定参数]的无限旋转设定设为[无限]。详细的设定方法请参照“轨道参数的设定”。
ID : 4901