
ID : 4900
附加轴的机械臂组登录
设定机械臂组,以通过程序使附加轴动作。
机械臂组
任务可通过获取控制权来使其执行动作命令。
为了获取所有控制权而将多个轴分组化即为机械臂组。
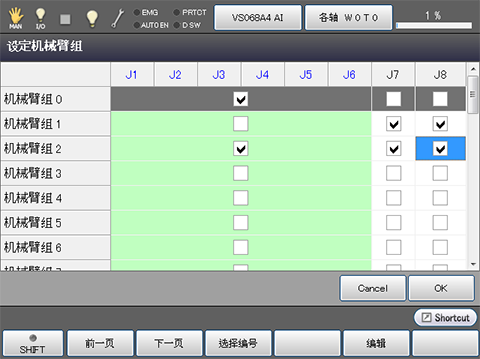
- 机械臂组(例:6轴机器人)
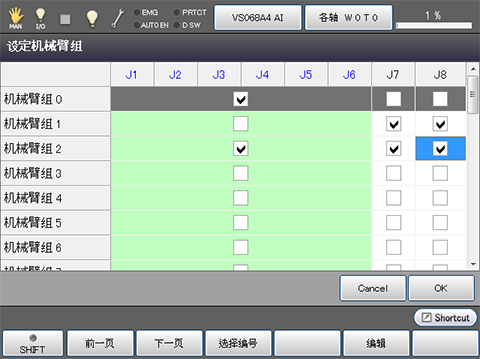
上述示例中,
机械臂组0:仅机器人轴
机械臂组1:仅附加轴(7轴、8轴)
机械臂组2:机器人轴+附加轴(7轴、8轴)
通过在任务上获取机械臂组,可使附加轴动作。
- 通过上述组设定获取机械臂组1的任务可仅使附加轴的7轴和8轴动作。
- 多个任务同时控制同一个轴时,不执行动作命令。
机械臂组获取方法
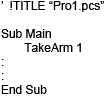
通过将获取的机械臂组编号保留在TakeArm指令的自变量中,获取机械臂组。
以下示例中,“Pro1”通过TakeArm指令获取机械臂组1。
使用机械臂组时的注意事项
如果机械臂组与其它程序中获取控制权的机械臂组轴重复,则无法在另外的程序中获取控制权。可同时执行没有重复轴的机械臂组的程序。
- 例
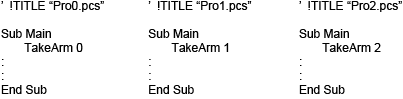
由于机械臂组0和机械臂组1中没有重复的轴,因此可同时执行“Pro0”和“Pro1”。(机器人与附加轴可通过不同程序同时运行。)
由于机械臂组0和机械臂组2中的轴(J1~J6)有重复,因此无法同时执行“Pro0”和“Pro2”。执行TakeArm指令时发生错误。
机械臂组的释放方法
通过执行GiveArm指令,释放当前获取的机械臂组的控制权。
由于发生错误或程序结束导致程序处于停止状态时,也自动释放控制权。
机械臂组的设定方法
1
按压基本画面 - [F2 机械臂] - [F12 维护] - [F10 轴设定] - [F1 机械臂组]。

显示“机械臂组设定”画面。
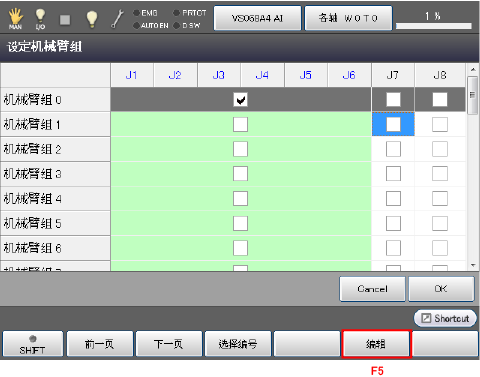
2
将光标移动至要设定的组的轴处,按压[F5 编辑]。
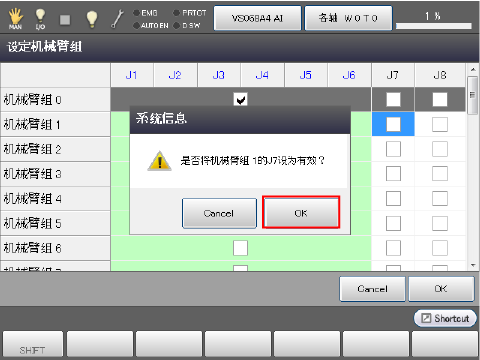
3
显示确认有效/无效的系统讯息后,如果正确则按压[OK]。
如果按压[Cancel],则不反映设定。
4
完成所有机械臂组的登录后,按压“机械臂组设定”画面的[OK]。
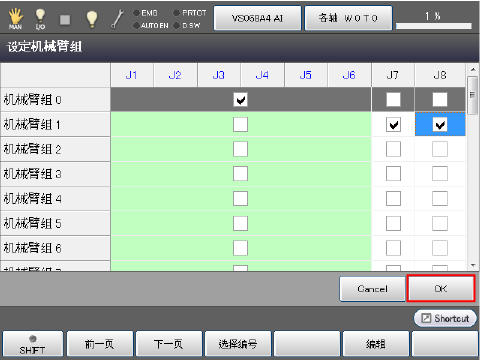
保存登录的机械臂组设定,返回“轴设定”画面。
设定机械臂组时的注意事项
- 再次接通控制器电源后,变更后的设定有效。
- 无法设定机械臂组0。
- 机器人以机器人轴为单位进行设定。例如,为6轴机器人时,从1轴到6轴全部设定为[有效]或[无效]。
-
通过机械臂组选择的轴,需要在“伺服设定”画面中将[轴有效无效设定]设定为[有效]。
ID : 4900